Visual-inertial odometry combines camera imagery with inertial sensor data to provide precise, real-time positioning in augmented reality applications, especially in environments with limited or no GPS signals. Unlike GPS-based positioning, which relies on satellite signals and may suffer from signal blockage or multipath errors, visual-inertial systems offer enhanced accuracy and robustness indoors and in dense urban areas. This technology enables seamless motion tracking and spatial mapping critical for immersive AR experiences.
Table of Comparison
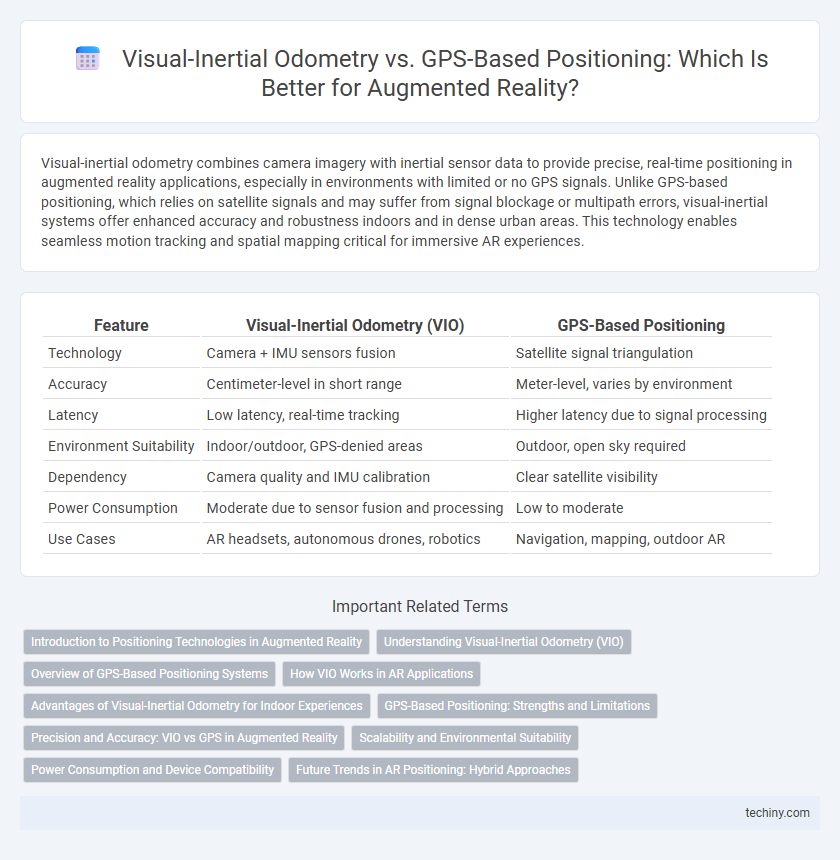
| Feature | Visual-Inertial Odometry (VIO) | GPS-Based Positioning |
|---|---|---|
| Technology | Camera + IMU sensors fusion | Satellite signal triangulation |
| Accuracy | Centimeter-level in short range | Meter-level, varies by environment |
| Latency | Low latency, real-time tracking | Higher latency due to signal processing |
| Environment Suitability | Indoor/outdoor, GPS-denied areas | Outdoor, open sky required |
| Dependency | Camera quality and IMU calibration | Clear satellite visibility |
| Power Consumption | Moderate due to sensor fusion and processing | Low to moderate |
| Use Cases | AR headsets, autonomous drones, robotics | Navigation, mapping, outdoor AR |
Introduction to Positioning Technologies in Augmented Reality
Visual-inertial odometry (VIO) combines camera data with inertial measurement units (IMUs) to provide precise, real-time tracking of device movement in augmented reality (AR) environments. GPS-based positioning relies on satellite signals for location data but often lacks the accuracy and responsiveness required for indoor or close-range AR applications. VIO enhances AR experiences by delivering continuous, high-fidelity positioning crucial for accurate overlay of virtual content in dynamic, complex environments.
Understanding Visual-Inertial Odometry (VIO)
Visual-inertial odometry (VIO) combines data from cameras and inertial measurement units (IMUs) to accurately estimate position and orientation in real-time, enhancing navigation in augmented reality (AR) applications. Unlike GPS-based positioning, VIO operates effectively indoors and in GPS-denied environments by tracking visual features and motion sensors simultaneously. This fusion of visual and inertial data provides robust and precise spatial localization critical for seamless AR experiences.
Overview of GPS-Based Positioning Systems
GPS-based positioning systems utilize a network of satellites to provide real-time geographic location data with typical accuracy ranging from 5 to 10 meters under open-sky conditions. These systems rely on signals from at least four satellites to calculate precise latitude, longitude, and altitude, enabling effective navigation in outdoor environments. Challenges such as signal obstruction, multipath errors, and limited indoor usability impact the reliability of GPS-based positioning for augmented reality applications.
How VIO Works in AR Applications
Visual-inertial odometry (VIO) in augmented reality combines data from a device's camera and inertial measurement unit (IMU) to track position and orientation in real time, enabling precise motion estimation without relying on external signals. VIO algorithms process consecutive image frames alongside accelerometer and gyroscope readings to detect changes in the environment and movement, providing continuous and drift-corrected localization critical for AR object placement and interaction. This sensor fusion approach enhances tracking robustness indoors and in GPS-denied environments, surpassing traditional GPS-based positioning's limitations in accuracy and responsiveness.
Advantages of Visual-Inertial Odometry for Indoor Experiences
Visual-inertial odometry (VIO) offers superior accuracy and robustness for indoor positioning by combining camera imagery with inertial sensor data to track movement without reliance on external signals. Unlike GPS, which suffers from signal degradation or complete loss indoors due to obstructions and multipath effects, VIO provides continuous real-time localization even in GPS-denied environments. These advantages make VIO essential for augmented reality applications that demand precise spatial awareness and seamless user experiences within complex indoor settings.
GPS-Based Positioning: Strengths and Limitations
GPS-based positioning provides reliable global coverage and is highly effective for outdoor augmented reality applications, offering accurate latitude and longitude data. However, its accuracy diminishes in urban canyons, dense forests, or indoor environments due to signal blockage and multipath effects. The inherent latency and lower update rates of GPS limit real-time precision, making it less suitable for applications requiring fine-grained spatial awareness.
Precision and Accuracy: VIO vs GPS in Augmented Reality
Visual-inertial odometry (VIO) offers significantly higher precision and accuracy than GPS-based positioning in augmented reality applications, especially in indoor and urban environments where satellite signals are weak or obstructed. VIO combines camera data and inertial measurements to accurately track device motion and orientation in real-time, achieving centimeter-level accuracy essential for seamless AR experiences. GPS positioning typically provides meter-level accuracy, making it less reliable for precise AR overlay alignment and spatial awareness.
Scalability and Environmental Suitability
Visual-inertial odometry offers superior scalability in augmented reality applications by relying on onboard cameras and inertial sensors, enabling precise positioning in GPS-denied environments such as indoors or urban canyons. GPS-based positioning depends on satellite signals, limiting its effectiveness in dense urban areas or indoors, where signal obstruction reduces accuracy and reliability. The integration of visual-inertial odometry enhances environmental adaptability, providing robust tracking across diverse settings without the need for external infrastructure.
Power Consumption and Device Compatibility
Visual-inertial odometry (VIO) typically consumes less power than GPS-based positioning because it relies on onboard cameras and inertial sensors rather than continuous satellite communication. VIO is highly compatible with a wide range of AR devices, including smartphones and AR glasses equipped with IMUs and cameras, enabling seamless indoor and urban navigation where GPS signals are weak or unavailable. GPS-based systems demand more battery usage and are mainly effective outdoors, limiting their integration with compact wearable AR devices.
Future Trends in AR Positioning: Hybrid Approaches
Hybrid positioning methods in augmented reality integrate visual-inertial odometry and GPS data to enhance accuracy and reliability in diverse environments. Future advancements emphasize sensor fusion algorithms that dynamically weigh visual, inertial, and satellite inputs for seamless localization. Emerging trends focus on leveraging machine learning to adapt positioning strategies in real-time, enabling robust AR experiences in both indoor and outdoor settings.
Visual-inertial odometry vs GPS-based positioning Infographic