Collision avoidance focuses on preventing physical contact between robots and moving or static entities by predicting trajectories and altering paths in real time. Obstacle avoidance involves detecting and navigating around stationary or dynamic objects using sensors and algorithms to ensure smooth robot operation. Both techniques are critical for safe autonomous navigation but prioritize different aspects of interaction with the environment.
Table of Comparison
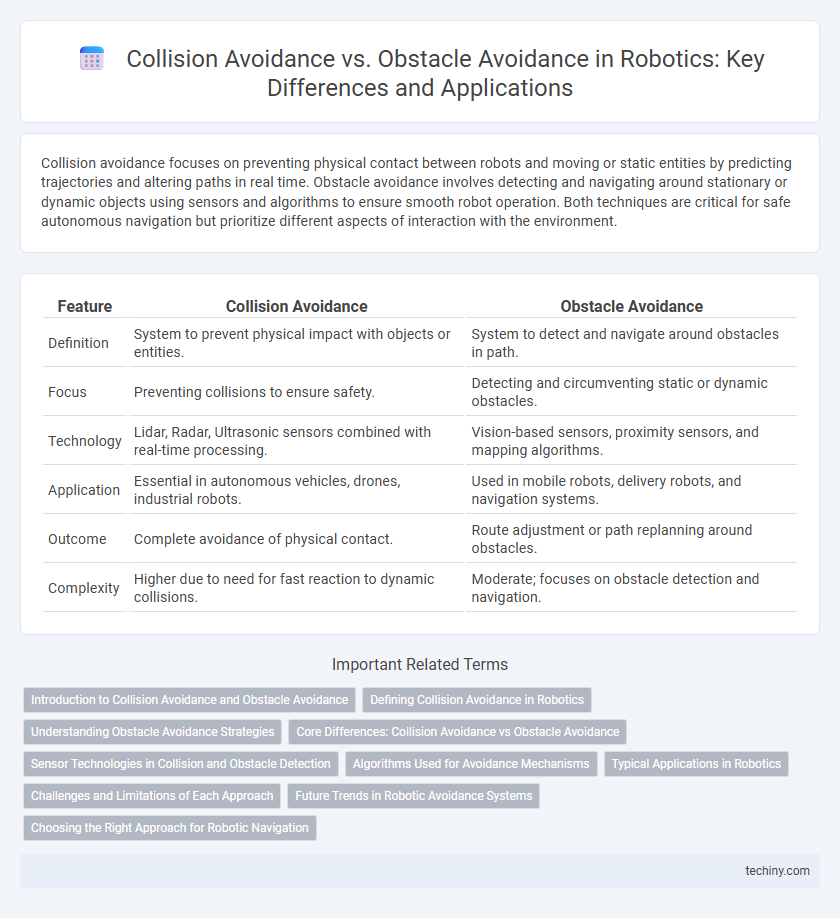
| Feature | Collision Avoidance | Obstacle Avoidance |
|---|---|---|
| Definition | System to prevent physical impact with objects or entities. | System to detect and navigate around obstacles in path. |
| Focus | Preventing collisions to ensure safety. | Detecting and circumventing static or dynamic obstacles. |
| Technology | Lidar, Radar, Ultrasonic sensors combined with real-time processing. | Vision-based sensors, proximity sensors, and mapping algorithms. |
| Application | Essential in autonomous vehicles, drones, industrial robots. | Used in mobile robots, delivery robots, and navigation systems. |
| Outcome | Complete avoidance of physical contact. | Route adjustment or path replanning around obstacles. |
| Complexity | Higher due to need for fast reaction to dynamic collisions. | Moderate; focuses on obstacle detection and navigation. |
Introduction to Collision Avoidance and Obstacle Avoidance
Collision avoidance in robotics involves detecting and preventing potential impacts with dynamic or static objects to ensure safe navigation within complex environments. Obstacle avoidance specifically refers to the robot's ability to identify and circumvent physical barriers in its path using sensors such as LiDAR, ultrasonic, or infrared systems. Understanding the distinction between these two concepts is crucial for developing advanced autonomous robots capable of real-time decision-making and adaptive path planning.
Defining Collision Avoidance in Robotics
Collision avoidance in robotics refers to the real-time detection and prevention of physical impacts between robots and their environment, ensuring safe navigation. It employs sensors like LiDAR, ultrasonic, and vision systems to create dynamic maps and predict potential collisions. This technique is critical for autonomous robots to operate efficiently in complex, unpredictable spaces without causing damage or interruptions.
Understanding Obstacle Avoidance Strategies
Obstacle avoidance strategies in robotics prioritize detecting and navigating around static and dynamic objects using sensors like LiDAR, ultrasonic, and cameras to prevent collisions. Techniques such as potential field methods, path planning algorithms, and reactive control systems enable robots to adapt in real-time to changing environments. Understanding these strategies is crucial for designing reliable autonomous systems that maintain operational safety and efficiency.
Core Differences: Collision Avoidance vs Obstacle Avoidance
Collision avoidance in robotics primarily focuses on detecting and preventing potential impacts with moving or stationary entities using sensors and real-time path adjustments. Obstacle avoidance involves identifying both static and dynamic impediments within the robot's environment to navigate safely and efficiently around them. The core difference lies in collision avoidance emphasizing immediate threat interception, while obstacle avoidance encompasses broader environmental awareness for path planning.
Sensor Technologies in Collision and Obstacle Detection
Collision avoidance and obstacle avoidance in robotics rely heavily on advanced sensor technologies such as LiDAR, ultrasonic sensors, and computer vision systems to detect potential hazards. LiDAR provides precise distance measurements by emitting laser pulses, while ultrasonic sensors use sound waves to identify nearby objects regardless of lighting conditions. Computer vision leverages cameras and machine learning algorithms to interpret complex environments, enabling robots to differentiate between static obstacles and dynamic collision threats for safer navigation.
Algorithms Used for Avoidance Mechanisms
Collision avoidance algorithms in robotics primarily rely on real-time sensor data and predictive modeling, utilizing methods such as potential fields, velocity obstacles, and dynamic window approaches to ensure robots proactively prevent collisions with moving or static objects. Obstacle avoidance commonly employs path-planning algorithms like A*, D*, and rapidly-exploring random trees (RRT), which focus on navigating around detected static obstacles by dynamically updating the robot's trajectory. Both approaches leverage sensor fusion from LiDAR, ultrasonic sensors, and cameras combined with machine learning techniques to enhance environment perception and decision-making accuracy during navigation tasks.
Typical Applications in Robotics
Collision avoidance is critical in autonomous mobile robots navigating dynamic environments, preventing crashes by detecting and responding to moving objects, while obstacle avoidance typically deals with static or slowly changing barriers in industrial robots and warehouse automation. Collision avoidance systems utilize advanced sensors such as LiDAR and radar for real-time adjustments in self-driving cars and service robots, enhancing safety during interaction with humans and other vehicles. Obstacle avoidance algorithms are commonly applied in robotic vacuum cleaners and robotic arms, enabling efficient path planning and ensuring uninterrupted task execution in controlled settings.
Challenges and Limitations of Each Approach
Collision avoidance systems in robotics primarily focus on preventing physical contact by detecting and responding to dynamic objects, but they face challenges in real-time processing and high-speed environments. Obstacle avoidance relies on static environment mapping and sensor fusion, often limited by sensor range, environmental complexity, and false positives. Both approaches struggle with unpredictable scenarios and require advanced algorithms to balance accuracy and computational efficiency.
Future Trends in Robotic Avoidance Systems
Future trends in robotic avoidance systems emphasize integrating advanced sensor fusion and AI-driven decision-making to enhance both collision avoidance and obstacle avoidance capabilities. Machine learning algorithms improve real-time environment mapping and predictive path planning, enabling robots to navigate complex, dynamic settings more safely and efficiently. Emerging technologies such as lidar, radar, and computer vision combined with edge computing will drive the evolution of more autonomous and adaptive robotic systems.
Choosing the Right Approach for Robotic Navigation
Collision avoidance focuses on preventing physical contact between the robot and any object by dynamically adjusting its trajectory in real-time, using sensors such as LIDAR, ultrasonic, and infrared. Obstacle avoidance emphasizes identifying and navigating around stationary or moving obstacles while maintaining efficiency in path planning through algorithms like A* or Rapidly-exploring Random Trees (RRT). Choosing the right approach depends on the robot's operational environment, sensor capabilities, and mission requirements, balancing safety and navigation efficiency.
Collision avoidance vs Obstacle avoidance Infographic