Degrees of freedom in robotics represent the number of independent movements a robot can perform, determining its flexibility and range of motion. Joints are the physical connections between robot segments that enable these movements, each contributing to the robot's total degrees of freedom. A higher number of joints usually increases the robot's degrees of freedom, allowing for more complex and precise tasks in various applications.
Table of Comparison
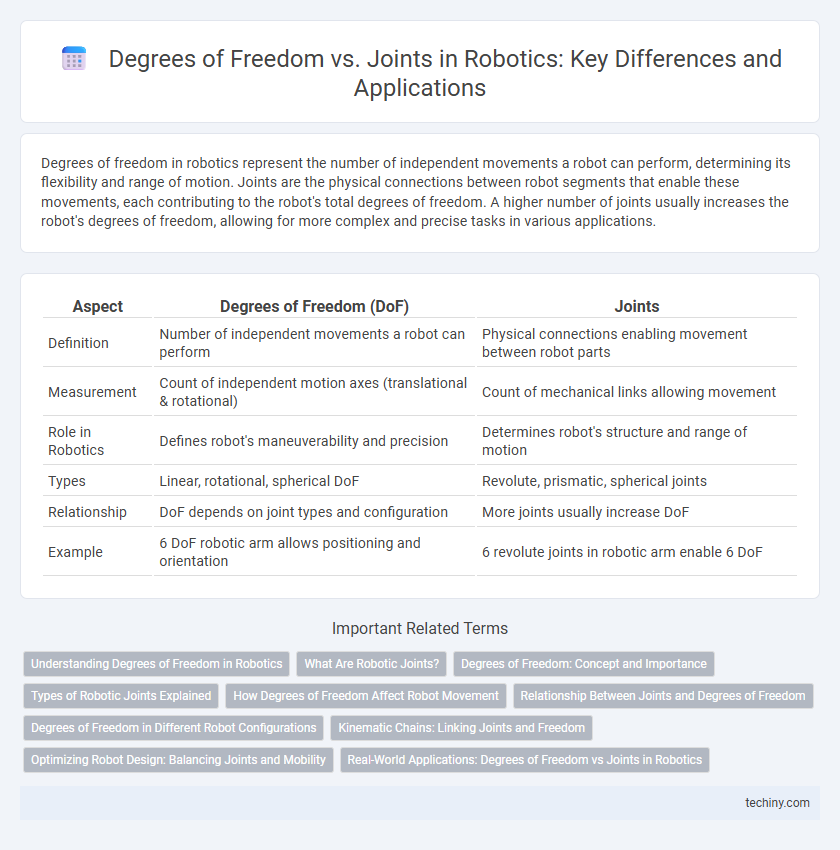
| Aspect | Degrees of Freedom (DoF) | Joints |
|---|---|---|
| Definition | Number of independent movements a robot can perform | Physical connections enabling movement between robot parts |
| Measurement | Count of independent motion axes (translational & rotational) | Count of mechanical links allowing movement |
| Role in Robotics | Defines robot's maneuverability and precision | Determines robot's structure and range of motion |
| Types | Linear, rotational, spherical DoF | Revolute, prismatic, spherical joints |
| Relationship | DoF depends on joint types and configuration | More joints usually increase DoF |
| Example | 6 DoF robotic arm allows positioning and orientation | 6 revolute joints in robotic arm enable 6 DoF |
Understanding Degrees of Freedom in Robotics
Degrees of freedom in robotics refer to the number of independent movements a robot can perform, typically linked to its joints. Each joint contributes one or more degrees of freedom depending on its type, such as revolute or prismatic, enabling complex motions in robotic arms or manipulators. Understanding the relationship between joints and degrees of freedom is crucial for designing robots capable of precise and versatile tasks.
What Are Robotic Joints?
Robotic joints are mechanical connections between two or more links of a robot that allow relative motion, enabling the structure to perform complex tasks. Each joint contributes to the robot's degrees of freedom (DOF), which define its ability to move in different directions, such as rotation or translation. Common types of robotic joints include revolute (rotational) and prismatic (linear) joints, pivotal for controlling the robot's range of motion and precision in applications like assembly or surgery.
Degrees of Freedom: Concept and Importance
Degrees of freedom (DOF) in robotics define the number of independent movements a robot can perform, directly impacting its flexibility and precision in executing tasks. Each DOF corresponds to a specific type of motion, such as rotation or translation, enabling complex manipulations and enhanced control over robotic arms or legs. Understanding and optimizing DOF is crucial for designing robots tailored to specialized applications, from industrial automation to medical surgery.
Types of Robotic Joints Explained
Robotic joints are critical components that determine the degrees of freedom (DoF) a robot can achieve, influencing its range of motion and functionality. Common types of robotic joints include revolute joints, which allow rotational movement around a single axis, prismatic joints that enable linear motion, and spherical joints providing multi-axis rotation for enhanced flexibility. Understanding these joint types is essential for designing robots optimized for specific tasks requiring precise positioning and manipulation capabilities.
How Degrees of Freedom Affect Robot Movement
Degrees of freedom (DOF) define the number of independent movements a robot can perform, directly influencing its ability to reach varied positions and orientations. Each joint type--revolute, prismatic, or spherical--contributes specific DOFs, determining the robot's flexibility and range of motion. A higher DOF count enables complex tasks such as precise manipulation and navigation in intricate environments, enhancing overall robotic performance.
Relationship Between Joints and Degrees of Freedom
Degrees of freedom (DoF) in robotics define the number of independent movements a robot can perform, directly influenced by the type and configuration of its joints. Each joint adds one or more degrees of freedom, with revolute joints typically contributing one rotational DoF and prismatic joints providing one translational DoF. The overall mobility and flexibility of robotic manipulators depend on the cumulative DoF from all joints, determining the robot's ability to position and orient its end-effector in 3D space.
Degrees of Freedom in Different Robot Configurations
Degrees of freedom (DOF) in robotics define the robot's ability to move independently in various directions, which directly impacts its dexterity and task versatility. Different robot configurations, such as articulated, SCARA, and Cartesian robots, offer varying DOF counts, with articulated robots typically providing six or more DOF for complex spatial maneuvering. Understanding the correlation between DOF and joint types is essential for optimizing robot design to meet specific operational requirements and workspace constraints.
Kinematic Chains: Linking Joints and Freedom
Kinematic chains in robotics consist of joints connecting rigid links, where degrees of freedom (DOF) quantify the independent movements each joint allows, directly influencing the robot's maneuverability and precision. Each joint type--revolute, prismatic, or spherical--contributes a specific number of degrees of freedom, with complex chains combining multiple joints to achieve versatile motion capabilities. Understanding the relationship between joints and DOF is essential for optimizing robotic arm design and ensuring precise control in applications such as manipulation and assembly.
Optimizing Robot Design: Balancing Joints and Mobility
Optimizing robot design requires balancing the number of joints with the desired degrees of freedom (DoF) to achieve maximum mobility and performance. Each joint contributes to the robot's overall DoF, but increasing joints can add complexity, weight, and control challenges. Engineers prioritize efficient joint placement and actuator selection to enhance maneuverability while minimizing mechanical constraints and energy consumption.
Real-World Applications: Degrees of Freedom vs Joints in Robotics
Degrees of freedom (DOF) in robotics refer to the number of independent movements a robot can perform, directly impacting its versatility in real-world tasks such as assembly, welding, and surgery. Joints, including revolute, prismatic, and spherical types, serve as the physical connections enabling these DOF, with the robot's functionality and precision hinging on the joint design and placement. High-DOF robots with multiple joints deliver enhanced maneuverability and adaptability, critical for complex environments like automated manufacturing lines and medical robotics.
Degrees of freedom vs Joints Infographic