Differential drive robots use two independently driven wheels on either side, enabling simple control and precise movement along two axes but limited lateral mobility. Omni-directional drive systems employ multiple wheels, often with rollers, allowing smooth movement in any direction without changing orientation. The choice between differential and omni-directional drives depends on maneuverability requirements and environmental constraints.
Table of Comparison
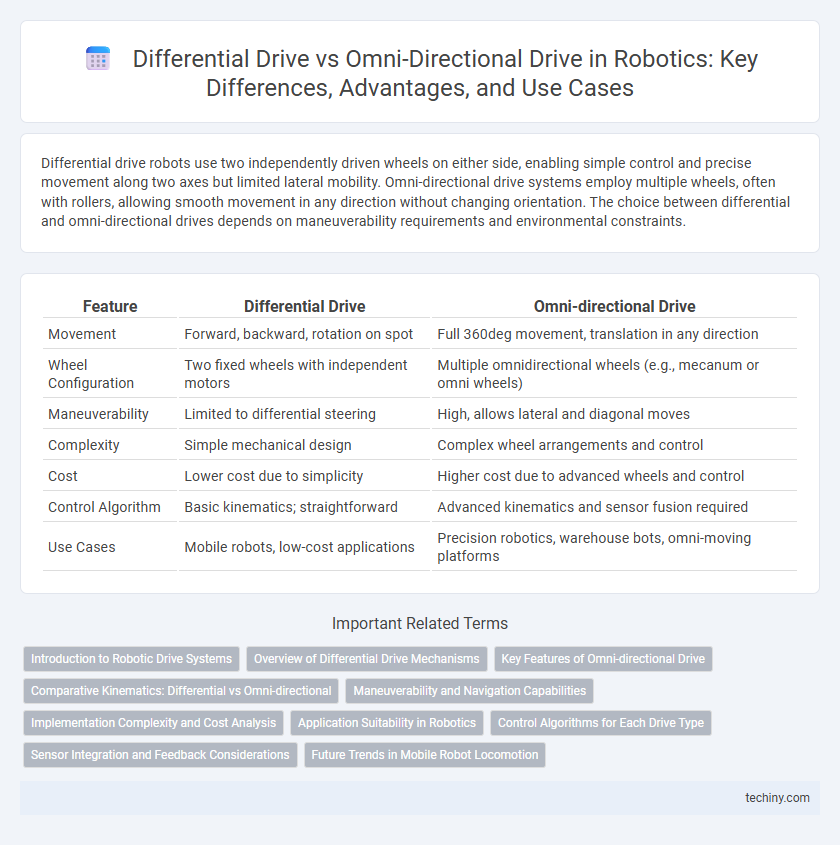
| Feature | Differential Drive | Omni-directional Drive |
|---|---|---|
| Movement | Forward, backward, rotation on spot | Full 360deg movement, translation in any direction |
| Wheel Configuration | Two fixed wheels with independent motors | Multiple omnidirectional wheels (e.g., mecanum or omni wheels) |
| Maneuverability | Limited to differential steering | High, allows lateral and diagonal moves |
| Complexity | Simple mechanical design | Complex wheel arrangements and control |
| Cost | Lower cost due to simplicity | Higher cost due to advanced wheels and control |
| Control Algorithm | Basic kinematics; straightforward | Advanced kinematics and sensor fusion required |
| Use Cases | Mobile robots, low-cost applications | Precision robotics, warehouse bots, omni-moving platforms |
Introduction to Robotic Drive Systems
Differential drive and omni-directional drive are two fundamental robotic drive systems that enable distinct maneuverability capabilities for robots. Differential drive utilizes two independently driven wheels that control movement and direction through speed variation, providing simple mechanical design and effective navigation on flat surfaces. Omni-directional drive employs multiple independently powered wheels with specialized rollers, allowing robots to move freely in any direction without changing orientation, enhancing mobility in complex environments.
Overview of Differential Drive Mechanisms
Differential drive mechanisms utilize two independently driven wheels on a common axis, enabling robots to achieve motion by varying the relative speed and direction of each wheel. This system provides precise control over turning and straightforward mechanical design, making it ideal for mobile robots navigating flat surfaces. Differential drives excel in simplicity and reliability but face limitations in maneuverability compared to omni-directional drives that employ additional wheels or rollers for lateral movement.
Key Features of Omni-directional Drive
Omni-directional drive systems enable robots to move seamlessly in any direction without changing their orientation, leveraging multiple wheels arranged to provide lateral and longitudinal motion. These drives utilize specialized wheel designs, such as omni-wheels or mecanum wheels, to achieve precise maneuverability and superior agility in tight spaces. The key features include enhanced mobility, smooth omnidirectional movement, and improved control during complex navigation tasks.
Comparative Kinematics: Differential vs Omni-directional
Differential drive robots use two independently driven wheels on either side, enabling straightforward forward, backward, and rotational movement with simpler kinematics but limited maneuverability. Omni-directional drive systems employ multiple omni-wheels positioned to allow movement in any direction without changing orientation, offering superior agility and complex trajectory control. The comparative kinematics highlight that differential drives excel in robust, energy-efficient motion on flat surfaces, while omni-directional drives provide enhanced precision and flexibility in dynamic and constrained environments.
Maneuverability and Navigation Capabilities
Differential drive robots rely on two independently controlled wheels for steering, offering straightforward control but limited lateral movement, which restricts maneuverability in tight or complex environments. Omni-directional drive systems utilize multiple wheels arranged to enable movement in any direction without changing orientation, significantly enhancing navigation capabilities in cluttered or dynamic spaces. This design allows for precise positioning and smoother path planning, making omni-directional drives superior for tasks requiring high agility and spatial adaptation.
Implementation Complexity and Cost Analysis
Differential drive systems feature a simpler mechanical design with two independently driven wheels, reducing implementation complexity and lowering initial costs compared to omni-directional drives. Omni-directional drives employ multiple wheel modules like mecanum or omni wheels, increasing mechanical intricacy and control algorithms, which raises both development time and expenses. Cost analysis reveals differential drives favor budget-sensitive projects, while omni-directional drives, though costlier, provide enhanced maneuverability essential for advanced robotics applications.
Application Suitability in Robotics
Differential drive robots excel in applications requiring straightforward navigation on flat surfaces, such as warehouse automation and mobile floor cleaning, due to their simple mechanical design and efficient turning capabilities. Omni-directional drive systems are ideal for environments demanding precise maneuverability and complex movement patterns, like robotic assistants in healthcare or logistics robots in crowded spaces. Selecting the appropriate drive system depends on factors like operational area constraints, required agility, and task-specific mobility needs.
Control Algorithms for Each Drive Type
Differential drive robots rely on control algorithms that manage independent wheel speeds to achieve precise linear and angular velocity, often using PID controllers and odometry for accurate navigation. Omni-directional drive systems require more complex algorithms to coordinate multiple wheels, such as mecanum or omni-wheels, enabling movement in any direction without changing orientation, typically utilizing inverse kinematics and sensor fusion for smooth trajectory control. Advanced control methods like model predictive control (MPC) and adaptive feedback loops enhance stability and responsiveness in both drive types, optimizing performance for dynamic environments.
Sensor Integration and Feedback Considerations
Differential drive robots rely heavily on wheel encoders and inertial measurement units (IMUs) for accurate odometry and pose estimation, providing straightforward sensor fusion but limited lateral movement sensing. Omni-directional drives require more complex sensor integration, combining multiple encoders with advanced inertial sensors and sometimes vision systems to handle omnidirectional motion feedback and maintain precise localization. Effective feedback control in omni-directional robots demands high-frequency data from diverse sensors to manage slip and drift, whereas differential drives benefit from simpler sensor architectures with easier calibration and error correction.
Future Trends in Mobile Robot Locomotion
Future trends in mobile robot locomotion emphasize enhanced maneuverability and adaptability, with omni-directional drives offering superior flexibility in tight spaces due to their multi-directional wheel designs. Differential drive systems continue to dominate cost-effective applications, benefiting from advancements in sensor integration and control algorithms for improved precision. Emerging technologies focus on hybrid locomotion systems that combine the stability of differential drives with the agility of omni-directional mechanisms, optimizing performance across diverse environments.
Differential drive vs Omni-directional drive Infographic