Gait generation in robotics involves the creation of rhythmic patterns that dictate the movement of limbs to achieve locomotion, emphasizing smooth and efficient transitions. Balance control ensures the robot maintains stability by adapting to external perturbations and terrain variations, preventing falls during motion. Integrating gait generation with balance control is essential for robust and agile navigation in complex environments.
Table of Comparison
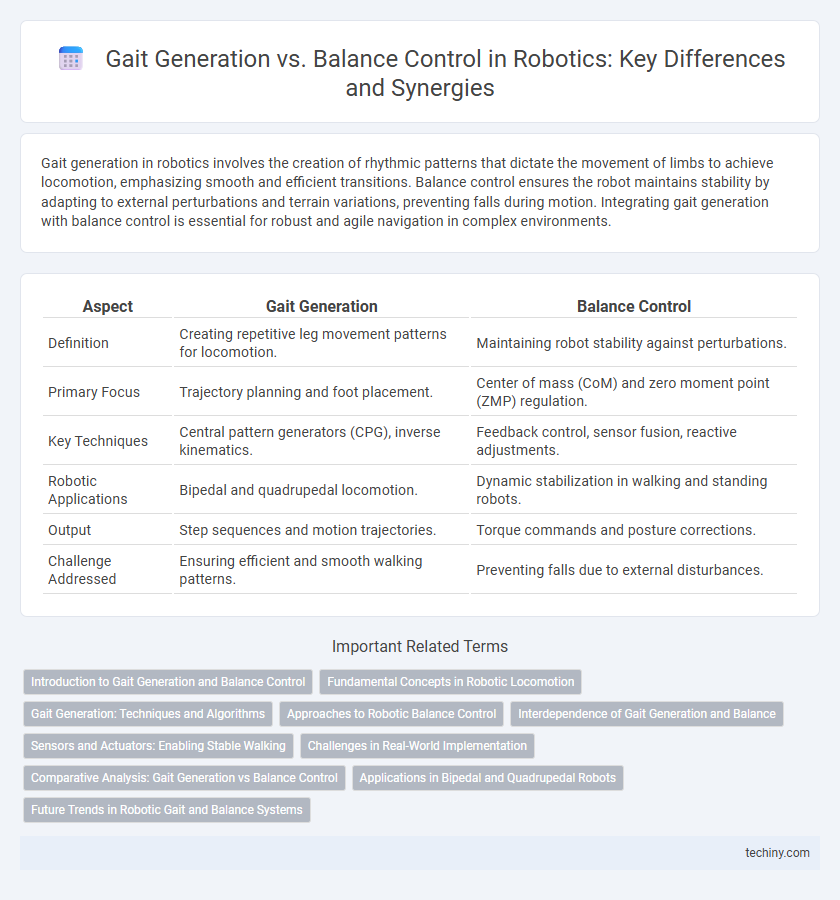
| Aspect | Gait Generation | Balance Control |
|---|---|---|
| Definition | Creating repetitive leg movement patterns for locomotion. | Maintaining robot stability against perturbations. |
| Primary Focus | Trajectory planning and foot placement. | Center of mass (CoM) and zero moment point (ZMP) regulation. |
| Key Techniques | Central pattern generators (CPG), inverse kinematics. | Feedback control, sensor fusion, reactive adjustments. |
| Robotic Applications | Bipedal and quadrupedal locomotion. | Dynamic stabilization in walking and standing robots. |
| Output | Step sequences and motion trajectories. | Torque commands and posture corrections. |
| Challenge Addressed | Ensuring efficient and smooth walking patterns. | Preventing falls due to external disturbances. |
Introduction to Gait Generation and Balance Control
Gait generation in robotics involves creating rhythmic and stable locomotion patterns that enable robots to move efficiently across various terrains. Balance control focuses on maintaining the robot's stability by continuously adjusting posture and forces, preventing falls during motion or while stationary. Effective integration of gait generation and balance control enhances robotic adaptability and performance in dynamic environments.
Fundamental Concepts in Robotic Locomotion
Gait generation in robotic locomotion involves planning the sequence and timing of leg movements to achieve stable and efficient walking patterns, essential for adapting to varied terrains. Balance control focuses on maintaining the robot's equilibrium by dynamically adjusting posture, center of mass, and ground reaction forces to prevent falls during motion. Both processes integrate sensor feedback and control algorithms to ensure seamless coordination between movement execution and stability maintenance in legged robots.
Gait Generation: Techniques and Algorithms
Gait generation in robotics involves designing algorithms that produce coordinated, stable walking patterns by controlling joint trajectories and timing. Techniques such as central pattern generators (CPGs), model predictive control (MPC), and inverse kinematics enable robots to adapt movements to varying terrains. Advanced machine learning methods optimize gait patterns by analyzing sensor data, enhancing efficiency and adaptability in autonomous robots.
Approaches to Robotic Balance Control
Robotic balance control approaches primarily include model-based methods, such as zero moment point (ZMP) control, which utilize dynamic models to maintain stability during locomotion. Sensor-based feedback systems integrate inertial measurement units (IMUs) and force sensors to adapt balance in real-time, enhancing robot responsiveness to uneven terrains. Machine learning techniques, including reinforcement learning, optimize control policies for balance by training robots to predict and adjust gait adjustments dynamically.
Interdependence of Gait Generation and Balance
Gait generation and balance control are intricately interdependent processes in robotics, with effective locomotion relying on their seamless integration. Precise gait generation algorithms must continuously adapt to real-time balance feedback to prevent falls and ensure stability during movement. Advances in sensor fusion and control systems enhance this synergy by enabling robots to dynamically adjust walking patterns in response to environmental perturbations.
Sensors and Actuators: Enabling Stable Walking
Sensors such as inertial measurement units (IMUs) and force-torque sensors provide real-time feedback critical for gait generation and balance control in robotics, enabling precise detection of body orientation and ground reaction forces. Actuators, including high-torque servo motors and variable stiffness actuators, translate sensor data into dynamic joint movements that maintain stability and adapt to uneven terrain. Integrating sensor inputs with actuator responses allows robots to perform stable walking by continuously adjusting posture and stride, reducing the risk of falls and improving locomotion efficiency.
Challenges in Real-World Implementation
Gait generation in robotics faces challenges such as terrain variability and dynamic obstacles, requiring adaptive algorithms for stable motion. Balance control demands precise sensor integration and real-time feedback loops to prevent falls under unpredictable disturbances. Both systems must operate seamlessly to ensure robust locomotion in complex, real-world environments.
Comparative Analysis: Gait Generation vs Balance Control
Gait generation algorithms focus on producing stable walking patterns by planning foot placements and limb trajectories, utilizing models like Zero Moment Point (ZMP) and Central Pattern Generators (CPGs). Balance control techniques emphasize real-time sensory feedback integration, such as inertial measurement units (IMUs) and force sensors, to maintain postural stability against perturbations. Comparative analysis reveals that gait generation provides predictive motion planning, while balance control ensures reactive adaptation, both critical for robust robotic locomotion.
Applications in Bipedal and Quadrupedal Robots
Gait generation in bipedal and quadrupedal robots focuses on creating stable, energy-efficient movement patterns tailored to diverse terrains and speeds. Balance control ensures dynamic stability by continuously adjusting posture and center of mass to prevent falls, especially during complex maneuvers or external disturbances. Integrating gait generation with advanced balance control algorithms enhances robotic agility and adaptability in real-world applications like search and rescue, delivery, and exploration.
Future Trends in Robotic Gait and Balance Systems
Future trends in robotic gait generation emphasize adaptive algorithms that utilize machine learning to optimize movement patterns for varied terrains and dynamic environments. Balance control advancements integrate real-time sensory feedback with AI-driven predictive models to enhance stability and energy efficiency during locomotion. Emerging systems focus on the seamless fusion of gait adaptability and robust balance mechanisms, enabling robots to perform complex tasks in unpredictable settings with improved autonomy and resilience.
Gait generation vs balance control Infographic