Hands-on teaching in robotics allows operators to physically guide robotic arms through desired motions, enabling intuitive task programming without complex coding. Offline programming uses specialized software to create and simulate robot paths in a virtual environment before deployment, minimizing downtime and enhancing precision. Comparing both methods, hands-on teaching accelerates learning for beginners, while offline programming optimizes productivity in complex industrial applications.
Table of Comparison
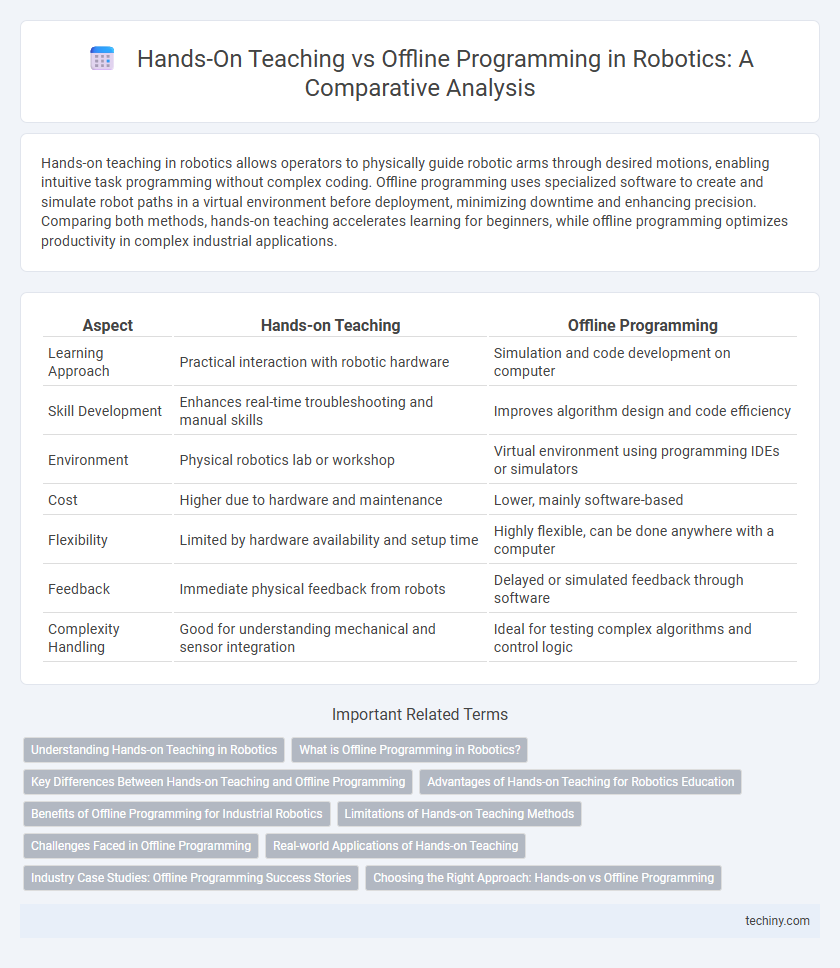
| Aspect | Hands-on Teaching | Offline Programming |
|---|---|---|
| Learning Approach | Practical interaction with robotic hardware | Simulation and code development on computer |
| Skill Development | Enhances real-time troubleshooting and manual skills | Improves algorithm design and code efficiency |
| Environment | Physical robotics lab or workshop | Virtual environment using programming IDEs or simulators |
| Cost | Higher due to hardware and maintenance | Lower, mainly software-based |
| Flexibility | Limited by hardware availability and setup time | Highly flexible, can be done anywhere with a computer |
| Feedback | Immediate physical feedback from robots | Delayed or simulated feedback through software |
| Complexity Handling | Good for understanding mechanical and sensor integration | Ideal for testing complex algorithms and control logic |
Understanding Hands-on Teaching in Robotics
Hands-on teaching in robotics involves physically interacting with the robot to program its movements, enhancing intuitive learning and real-time feedback. This method accelerates skill acquisition by allowing users to directly manipulate joints and sensors, fostering deeper comprehension of robotic kinematics and control systems. Compared to offline programming, hands-on teaching reduces the gap between theoretical concepts and practical application, improving error detection and programming efficiency.
What is Offline Programming in Robotics?
Offline programming in robotics involves creating and simulating robot programs on a computer without halting production or physically interacting with the robot. This method uses specialized software to design, test, and optimize robotic tasks, significantly reducing downtime and increasing efficiency in manufacturing processes. Offline programming enhances precision and flexibility by allowing engineers to adjust robot paths and operations before deploying them on the factory floor.
Key Differences Between Hands-on Teaching and Offline Programming
Hands-on teaching involves physically guiding the robot to perform tasks, allowing direct interaction and immediate feedback, which enhances intuitive learning and fine-tuning of movements. Offline programming uses software to create and simulate robot programs without physical interaction, enabling efficient planning, optimization, and error detection before deployment. Key differences include the tactile experience and real-time adjustment in hands-on teaching versus the virtual, risk-free environment and batch editing capabilities of offline programming.
Advantages of Hands-on Teaching for Robotics Education
Hands-on teaching in robotics education enhances practical skills by allowing students to directly interact with robotic systems, fostering intuitive understanding of mechanics and programming. This approach accelerates skill acquisition through real-time problem solving, critical for mastering robot operation and troubleshooting. Experiencing physical hardware manipulation helps bridge the gap between theoretical knowledge and actual robotic application, leading to more effective learning outcomes compared to offline programming alone.
Benefits of Offline Programming for Industrial Robotics
Offline programming for industrial robotics significantly reduces production downtime by enabling code development and simulation without halting machinery. It enhances precision and consistency through advanced virtual modeling, allowing error detection before deployment on the factory floor. This method accelerates deployment times and optimizes workflow efficiency, leading to increased overall productivity in manufacturing processes.
Limitations of Hands-on Teaching Methods
Hands-on teaching in robotics often faces limitations such as high dependency on physical hardware availability, which can lead to increased downtime and resource constraints. This method may also restrict scalability and flexibility because each programming change requires manual intervention on the robot itself. Moreover, hands-on teaching can introduce inconsistencies due to environmental factors and human error, impacting the precision and repeatability of robot tasks.
Challenges Faced in Offline Programming
Offline programming in robotics faces challenges such as limited accuracy in simulating real-world environments, which leads to discrepancies between programmed movements and actual robot performance. Complex calibration requirements and the need for precise kinematic models can hinder efficient path planning and error correction. The inability to instantly test and adapt code in a physical setting often results in extended development cycles and increased debugging efforts.
Real-world Applications of Hands-on Teaching
Hands-on teaching in robotics enables learners to directly interact with physical robots, enhancing problem-solving skills and fostering intuitive understanding of mechanical and sensor interactions essential for real-world applications. Unlike offline programming, which focuses on virtual code simulation, hands-on methods expose students to practical challenges like hardware limitations, environmental variables, and real-time troubleshooting. This experiential learning approach accelerates skill acquisition and prepares learners for dynamic industrial tasks such as assembly line automation and collaborative robot operation.
Industry Case Studies: Offline Programming Success Stories
Industry case studies highlight significant productivity gains using offline programming in robotics, with manufacturers reducing robot commissioning time by up to 50%. Hands-on teaching often involves direct interaction but requires robots to be taken offline, disrupting production schedules. Offline programming enables virtual simulation and precise path planning, increasing deployment efficiency and minimizing downtime in automation systems.
Choosing the Right Approach: Hands-on vs Offline Programming
Selecting the appropriate robotics programming method depends on project complexity and learning objectives. Hands-on teaching offers real-time, intuitive interaction ideal for quick prototyping and skill acquisition, while offline programming enables precise, pre-planned code development suited for complex, large-scale automation tasks. Evaluating factors such as environment control, error tolerance, and deployment speed ensures optimal alignment with operational goals.
Hands-on teaching vs Offline programming Infographic