Inverse dynamics calculates joint torques from known motion trajectories, enabling precise control of robotic limbs by determining required forces for desired movements. Forward dynamics predicts resulting motions from given joint torques, essential for simulating robot behavior and understanding system responses under various inputs. Both methods are fundamental in robotics for modeling, control, and optimizing performance in robotic systems.
Table of Comparison
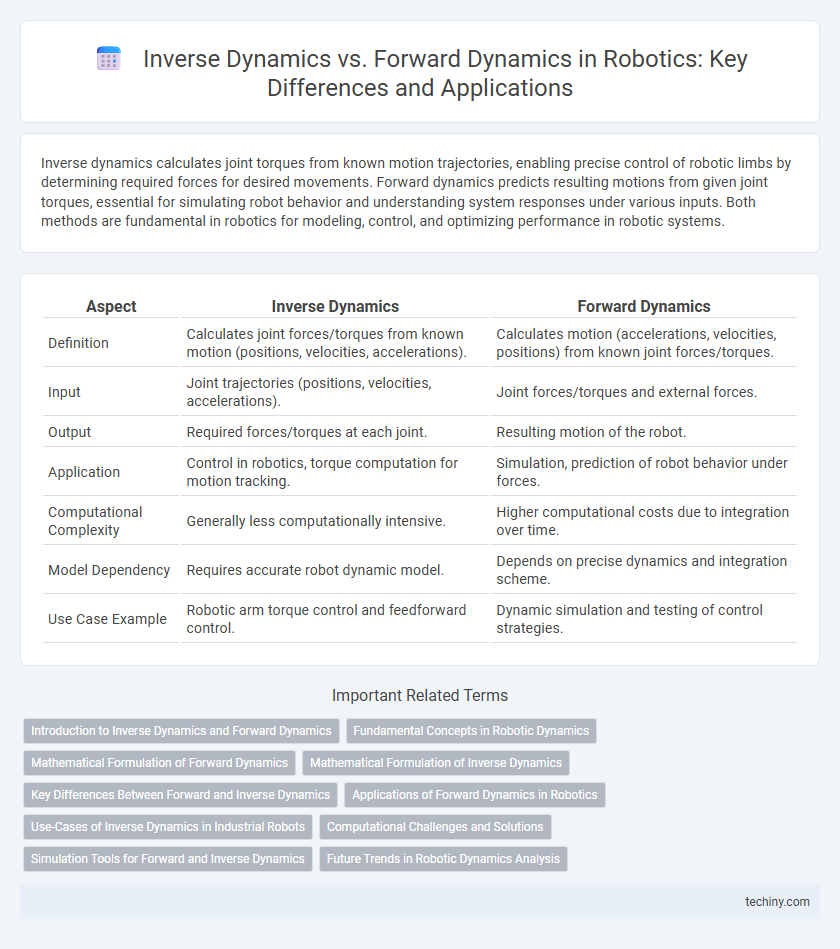
| Aspect | Inverse Dynamics | Forward Dynamics |
|---|---|---|
| Definition | Calculates joint forces/torques from known motion (positions, velocities, accelerations). | Calculates motion (accelerations, velocities, positions) from known joint forces/torques. |
| Input | Joint trajectories (positions, velocities, accelerations). | Joint forces/torques and external forces. |
| Output | Required forces/torques at each joint. | Resulting motion of the robot. |
| Application | Control in robotics, torque computation for motion tracking. | Simulation, prediction of robot behavior under forces. |
| Computational Complexity | Generally less computationally intensive. | Higher computational costs due to integration over time. |
| Model Dependency | Requires accurate robot dynamic model. | Depends on precise dynamics and integration scheme. |
| Use Case Example | Robotic arm torque control and feedforward control. | Dynamic simulation and testing of control strategies. |
Introduction to Inverse Dynamics and Forward Dynamics
Inverse dynamics calculates the necessary joint torques or forces to produce a desired motion based on robot kinematics and dynamics equations. Forward dynamics involves computing the resulting robot motion by applying known joint torques or forces and integrating the equations of motion. Both methods are fundamental in robotic control and simulation, enabling precise trajectory tracking and dynamic behavior prediction.
Fundamental Concepts in Robotic Dynamics
Inverse dynamics calculates the required joint torques and forces to produce a desired motion in robotic systems, utilizing known kinematic trajectories and dynamic parameters. Forward dynamics predicts the resulting motion of a robot by computing accelerations from given joint torques, applying Newton-Euler or Lagrangian formulations to solve equations of motion. Both methods are fundamental in robotic dynamics for control, simulation, and trajectory planning, with inverse dynamics commonly used in feedforward control and forward dynamics essential for motion prediction and stability analysis.
Mathematical Formulation of Forward Dynamics
Forward dynamics in robotics involves computing joint accelerations from known joint torques and current states, based on the equation \( \tau = M(q)\ddot{q} + C(q, \dot{q})\dot{q} + G(q) \), where \( \tau \) represents joint torques, \( M(q) \) is the mass matrix, \( C(q, \dot{q}) \) denotes Coriolis and centrifugal forces, and \( G(q) \) corresponds to gravitational forces. The mathematical formulation requires solving for joint accelerations \( \ddot{q} \) by inverting the mass matrix \( M(q) \), yielding \( \ddot{q} = M(q)^{-1} [\tau - C(q, \dot{q})\dot{q} - G(q)] \). This process is fundamental in simulating robot motion and designing control algorithms based on dynamic response predictions.
Mathematical Formulation of Inverse Dynamics
Inverse dynamics in robotics mathematically formulates joint torques and forces required to produce a given motion by applying Newton-Euler or Lagrangian equations of motion. The process involves solving dynamic equations expressed as t = M(q)u + C(q, q)q + G(q), where t represents joint torques, M(q) is the inertia matrix, C(q, q) denotes Coriolis and centrifugal forces, and G(q) accounts for gravitational effects. This formulation enables precise computation of actuator inputs for desired trajectories, critical for robot control and simulation tasks.
Key Differences Between Forward and Inverse Dynamics
Forward dynamics computes the resulting motion of a robotic system given known forces or torques applied to its joints, solving equations of motion to predict accelerations and trajectories. Inverse dynamics, by contrast, determines the necessary joint forces or torques required to produce a specific desired motion, working backward from kinematic data such as position, velocity, and acceleration. The key difference lies in forward dynamics's role in motion prediction, while inverse dynamics focuses on control input estimation for achieving target movements in robotic manipulators or legged robots.
Applications of Forward Dynamics in Robotics
Forward dynamics in robotics enables accurate prediction of a robot's motion based on given joint torques, crucial for real-time control and simulation of dynamic behaviors. Applications include trajectory optimization for robotic manipulators, enabling adaptive movements in complex environments, and enhancing the performance of autonomous robots in tasks such as walking, climbing, and manipulation. This approach supports model-based control strategies like computed torque control and model predictive control, improving precision and efficiency in robotic systems.
Use-Cases of Inverse Dynamics in Industrial Robots
Inverse dynamics in industrial robots is crucial for precise control of joint torques based on desired motion trajectories, enabling real-time adjustment during tasks like welding, assembly, and material handling. It allows for accurate force estimation and feedforward control, improving robot responsiveness and energy efficiency in dynamic environments. This method is essential in advanced robotic systems where maintaining stability and accuracy under varying load conditions directly impacts manufacturing quality and productivity.
Computational Challenges and Solutions
Inverse dynamics involves computing required joint torques from desired motion, presenting challenges in real-time control due to complex multibody dynamics and high computational load. Forward dynamics predicts motion from applied forces, demanding efficient algorithms to solve differential equations rapidly for simulation and control purposes. Techniques such as recursive Newton-Euler algorithms and optimized numerical integrators address these computational challenges, enabling faster and more accurate dynamic analysis in robotic systems.
Simulation Tools for Forward and Inverse Dynamics
Simulation tools for forward dynamics in robotics compute the motion of robots by applying known forces and torques to predict resulting movements through numerical integration of equations of motion. Inverse dynamics simulation tools calculate the necessary joint forces and torques required to achieve a desired trajectory, enabling control and optimization of robot movements. Advanced platforms like MATLAB Simulink, ROS with MoveIt, and Gazebo offer integrated environments for both forward and inverse dynamics simulations, facilitating accurate modeling, control strategy testing, and real-time feedback analysis.
Future Trends in Robotic Dynamics Analysis
Future trends in robotic dynamics analysis emphasize the integration of machine learning techniques with inverse dynamics for more accurate and real-time estimation of joint torques and forces. Advances in sensor fusion and high-performance computing enable forward dynamics simulations to become more efficient, supporting complex robot motion planning and control under uncertainty. The development of hybrid models combining data-driven and physics-based approaches aims to enhance predictive capabilities and adaptability in autonomous robotic systems.
Inverse dynamics vs forward dynamics Infographic