Kinematic redundancy occurs when a robot has more degrees of freedom than necessary to perform a given task, allowing for flexibility in motion planning and obstacle avoidance. Structural redundancy refers to the presence of multiple components performing similar functions, enhancing fault tolerance and reliability in robotic systems. Both forms of redundancy improve robotic performance but address different aspects of functionality: motion versatility versus system robustness.
Table of Comparison
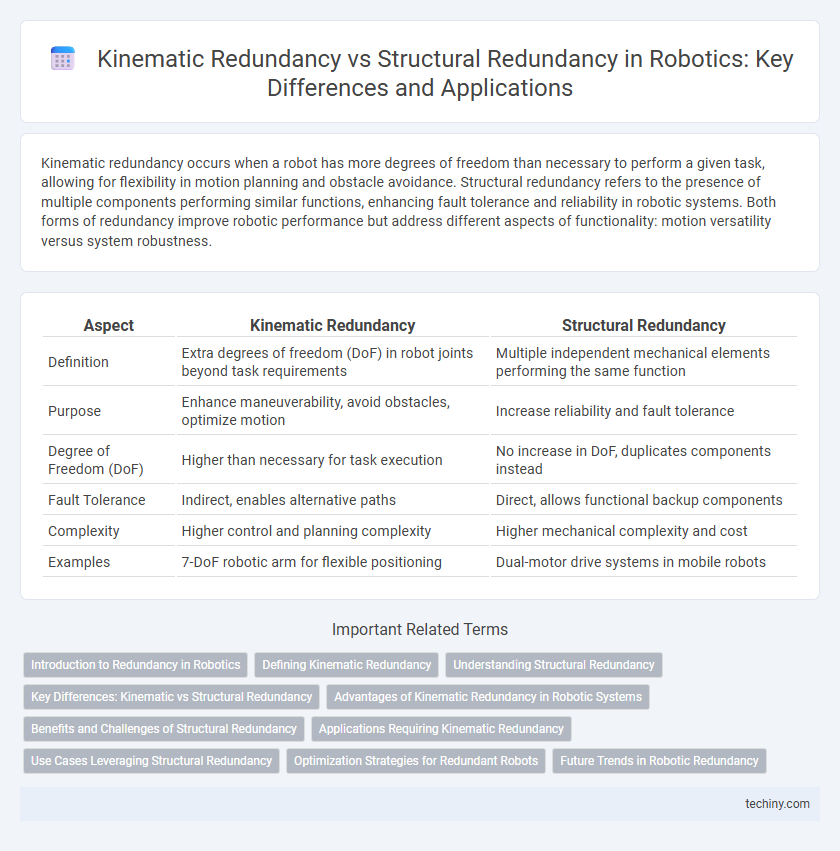
| Aspect | Kinematic Redundancy | Structural Redundancy |
|---|---|---|
| Definition | Extra degrees of freedom (DoF) in robot joints beyond task requirements | Multiple independent mechanical elements performing the same function |
| Purpose | Enhance maneuverability, avoid obstacles, optimize motion | Increase reliability and fault tolerance |
| Degree of Freedom (DoF) | Higher than necessary for task execution | No increase in DoF, duplicates components instead |
| Fault Tolerance | Indirect, enables alternative paths | Direct, allows functional backup components |
| Complexity | Higher control and planning complexity | Higher mechanical complexity and cost |
| Examples | 7-DoF robotic arm for flexible positioning | Dual-motor drive systems in mobile robots |
Introduction to Redundancy in Robotics
Kinematic redundancy in robotics occurs when a robot has more degrees of freedom than are necessary to perform a given task, enabling improved maneuverability and obstacle avoidance. Structural redundancy refers to the presence of multiple similar components or pathways within a robot's mechanical design, enhancing fault tolerance and reliability. Understanding these two types of redundancy is essential for optimizing robot performance, flexibility, and robustness in complex environments.
Defining Kinematic Redundancy
Kinematic redundancy occurs when a robotic system possesses more degrees of freedom than are necessary to perform a given task, enabling multiple joint configurations to achieve the same end-effector position. This redundancy allows enhanced flexibility in motion planning, obstacle avoidance, and fault tolerance compared to structurally redundant systems, which have duplicate components for reliability. Understanding kinematic redundancy is essential for optimizing robotic manipulator designs and improving control algorithms.
Understanding Structural Redundancy
Structural redundancy in robotics refers to the presence of extra mechanical components or degrees of freedom beyond what is necessary for a task, allowing for increased fault tolerance and flexibility in operation. Unlike kinematic redundancy, which involves multiple joint configurations to achieve the same end-effector position, structural redundancy enhances robustness by enabling the robot to maintain functionality even if certain elements fail. This redundancy is critical in designing robots for hazardous environments, ensuring continuous operation despite mechanical damage.
Key Differences: Kinematic vs Structural Redundancy
Kinematic redundancy occurs when a robot has more degrees of freedom than necessary to complete a task, allowing multiple joint configurations to achieve the same end-effector position and improving maneuverability. Structural redundancy refers to the presence of extra physical components or mechanisms, such as additional limbs or actuators, enhancing reliability and fault tolerance by enabling continued operation despite component failures. The key difference lies in kinematic redundancy optimizing motion through extra degrees of freedom, while structural redundancy provides robustness through additional hardware elements.
Advantages of Kinematic Redundancy in Robotic Systems
Kinematic redundancy in robotic systems enhances flexibility by allowing multiple joint configurations to achieve the same end-effector position, improving obstacle avoidance and dexterity. This redundancy optimizes motion planning, resulting in smoother trajectories and increased fault tolerance during complex tasks. Compared to structural redundancy, it reduces mechanical complexity and weight, lowering production costs and maintenance requirements.
Benefits and Challenges of Structural Redundancy
Structural redundancy in robotics offers enhanced fault tolerance by incorporating extra physical components, allowing the system to maintain functionality despite failures. This redundancy improves reliability and robustness, particularly in critical applications such as industrial automation and surgical robotics. Challenges include increased system complexity, higher costs, and the need for sophisticated control algorithms to manage the additional degrees of freedom effectively.
Applications Requiring Kinematic Redundancy
Kinematic redundancy enhances a robot's ability to navigate complex environments and avoid obstacles by providing extra degrees of freedom, crucial in applications such as surgical robotics and advanced manufacturing. This redundancy allows for flexible motion planning and improved manipulability, enabling robots to perform tasks in constrained or cluttered spaces. Structural redundancy, while related to physical robustness, does not offer the same dexterity benefits vital for precise and adaptive movements in kinematically redundant systems.
Use Cases Leveraging Structural Redundancy
Structural redundancy in robotics provides multiple physical components, such as additional joints or limbs, enabling robust fault tolerance and enhanced load distribution. Use cases leveraging structural redundancy include humanoid robots performing complex tasks where failure of a single actuator does not compromise overall functionality. Industrial robotic arms in harsh environments utilize structural redundancy to maintain operational continuity despite mechanical component failures.
Optimization Strategies for Redundant Robots
Kinematic redundancy in robotics involves robots with more degrees of freedom than necessary to perform a task, allowing multiple joint configurations to achieve the same end-effector position. Structural redundancy refers to additional physical limbs or modules that provide alternate pathways for task execution, enhancing fault tolerance and operational flexibility. Optimization strategies for redundant robots focus on minimizing energy consumption, avoiding singularities, and improving obstacle avoidance by leveraging inverse kinematics algorithms and cost functions tailored to the specific redundancy type.
Future Trends in Robotic Redundancy
Future trends in robotic redundancy emphasize integrating kinematic redundancy with advanced AI algorithms to enhance adaptive task execution and obstacle avoidance. Structural redundancy developments focus on modular and reconfigurable robot designs that improve fault tolerance and operational flexibility in dynamic environments. Emerging research highlights hybrid approaches combining both redundancies to optimize performance, reliability, and energy efficiency in next-generation robotic systems.
Kinematic redundancy vs Structural redundancy Infographic