Line following robots use sensors to detect and follow a predefined path marked by lines, enabling precise navigation in structured environments. Obstacle avoidance robots rely on proximity sensors to detect and circumvent unexpected objects, ensuring safe movement in dynamic or cluttered spaces. Combining these capabilities enhances robot autonomy and adaptability in complex tasks.
Table of Comparison
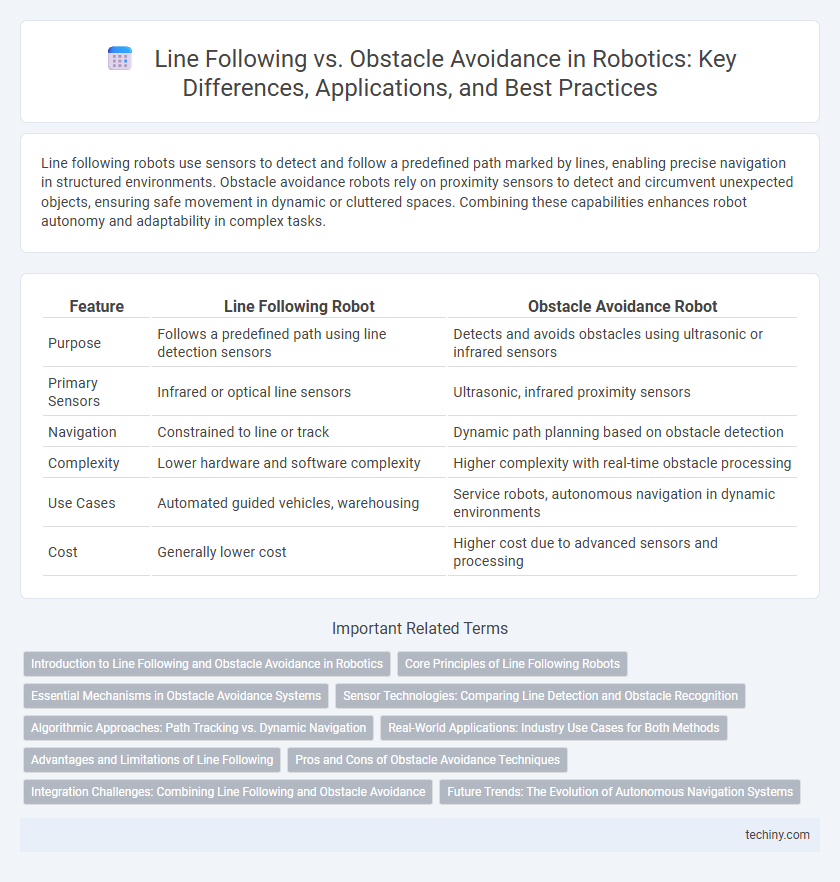
| Feature | Line Following Robot | Obstacle Avoidance Robot |
|---|---|---|
| Purpose | Follows a predefined path using line detection sensors | Detects and avoids obstacles using ultrasonic or infrared sensors |
| Primary Sensors | Infrared or optical line sensors | Ultrasonic, infrared proximity sensors |
| Navigation | Constrained to line or track | Dynamic path planning based on obstacle detection |
| Complexity | Lower hardware and software complexity | Higher complexity with real-time obstacle processing |
| Use Cases | Automated guided vehicles, warehousing | Service robots, autonomous navigation in dynamic environments |
| Cost | Generally lower cost | Higher cost due to advanced sensors and processing |
Introduction to Line Following and Obstacle Avoidance in Robotics
Line following in robotics involves sensors detecting and tracking a visual path, enabling autonomous navigation along predefined routes. Obstacle avoidance employs ultrasonic or infrared sensors to detect and circumvent unexpected objects, ensuring safe movement in dynamic environments. Integrating both techniques enhances robotic autonomy and operational efficiency across various applications.
Core Principles of Line Following Robots
Line following robots operate primarily by using optical sensors to detect and track a specific color or contrast line on the ground, enabling precise navigation along predefined paths. These robots rely on real-time feedback control systems to continuously adjust their motor speeds and maintain alignment with the detected line. Core principles include sensor calibration, proportional-integral-derivative (PID) control algorithms, and efficient path correction to ensure smooth and accurate line tracking in dynamic environments.
Essential Mechanisms in Obstacle Avoidance Systems
Obstacle avoidance systems in robotics utilize ultrasonic sensors, infrared sensors, and LiDAR to detect and measure the distance of surrounding objects, enabling real-time path adjustments. These systems rely on algorithms such as potential fields and vector field histograms to interpret sensor data and navigate safely around obstacles. Effective obstacle avoidance mechanisms integrate sensor fusion and adaptive control strategies to enhance accuracy and reliability in dynamic environments.
Sensor Technologies: Comparing Line Detection and Obstacle Recognition
Line following robots primarily rely on infrared (IR) sensors and reflectance sensors to detect and differentiate line patterns on surfaces, enabling precise path tracking. Obstacle avoidance robots utilize ultrasonic sensors, LiDAR, and time-of-flight cameras to identify and measure the distance to objects, ensuring real-time navigation around obstacles. Sensor fusion combining IR and ultrasonic technologies enhances both line detection accuracy and obstacle recognition efficiency in complex environments.
Algorithmic Approaches: Path Tracking vs. Dynamic Navigation
Line following relies on path tracking algorithms that use sensor data to maintain a predefined trajectory along visible lines, optimizing for precision and minimal deviation. Obstacle avoidance employs dynamic navigation techniques integrating real-time environmental mapping with reactive path planning to circumvent unforeseen barriers. Combining predictive control with sensor fusion enhances both approaches, enabling adaptive and efficient robotic movement in variable conditions.
Real-World Applications: Industry Use Cases for Both Methods
Line following robots excel in warehouse automation by precisely navigating predefined paths to transport goods efficiently and reduce human error. Obstacle avoidance systems are critical in autonomous delivery robots and manufacturing environments, enabling real-time detection and circumvention of unexpected objects to maintain workflow continuity and safety. Combining both technologies enhances robotic performance in complex industrial settings, increasing productivity and adaptability.
Advantages and Limitations of Line Following
Line following robots excel in precision navigation along predefined paths by utilizing infrared or optical sensors, ensuring consistent and repeatable movement ideal for industrial automation and conveyor systems. Their main limitation lies in the inability to adapt to dynamic environments or unexpected obstacles, restricting their use to controlled settings. Line following technology offers simplicity and cost-effectiveness but lacks versatility compared to obstacle avoidance systems that require complex sensors and algorithms for real-time decision-making.
Pros and Cons of Obstacle Avoidance Techniques
Obstacle avoidance techniques in robotics enhance navigation by allowing robots to detect and circumvent objects, improving operational safety in dynamic environments. Common methods include ultrasonic sensors, infrared sensors, and LIDAR, each offering different detection ranges and accuracy levels; ultrasonic sensors provide robust distance measurement but may struggle with soft surfaces, while infrared sensors are cost-effective but limited by ambient light interference. Despite increased computational requirements and potential sensor blind spots, effective obstacle avoidance improves autonomy and reduces collision risk compared to simpler line-following systems.
Integration Challenges: Combining Line Following and Obstacle Avoidance
Integrating line following and obstacle avoidance in robotics presents challenges such as sensor fusion complexity and real-time decision-making conflicts. Effective algorithms must prioritize path adherence while dynamically responding to unforeseen obstacles, balancing speed and accuracy. Optimizing hardware interfaces and processing power is essential for seamless coordination between line tracking sensors and obstacle detection systems.
Future Trends: The Evolution of Autonomous Navigation Systems
Future trends in autonomous navigation systems emphasize the integration of advanced sensor fusion, combining LiDAR, cameras, and ultrasonic sensors to enhance both line following and obstacle avoidance capabilities. Machine learning algorithms are increasingly deployed to improve real-time decision-making and adaptive path planning, enabling robots to navigate complex, dynamic environments more efficiently. The evolution toward fully autonomous navigation involves seamless interaction between environmental perception and predictive analytics for proactive obstacle detection and trajectory optimization.
Line Following vs Obstacle Avoidance Infographic