Path planning determines the optimal route a robot should take from its starting point to its destination, considering obstacles and environment constraints. Trajectory planning takes this route and defines the motion parameters, including velocity, acceleration, and time, to ensure smooth and feasible robot movement. Efficient integration of both planning stages is crucial for precise and reliable robotic navigation.
Table of Comparison
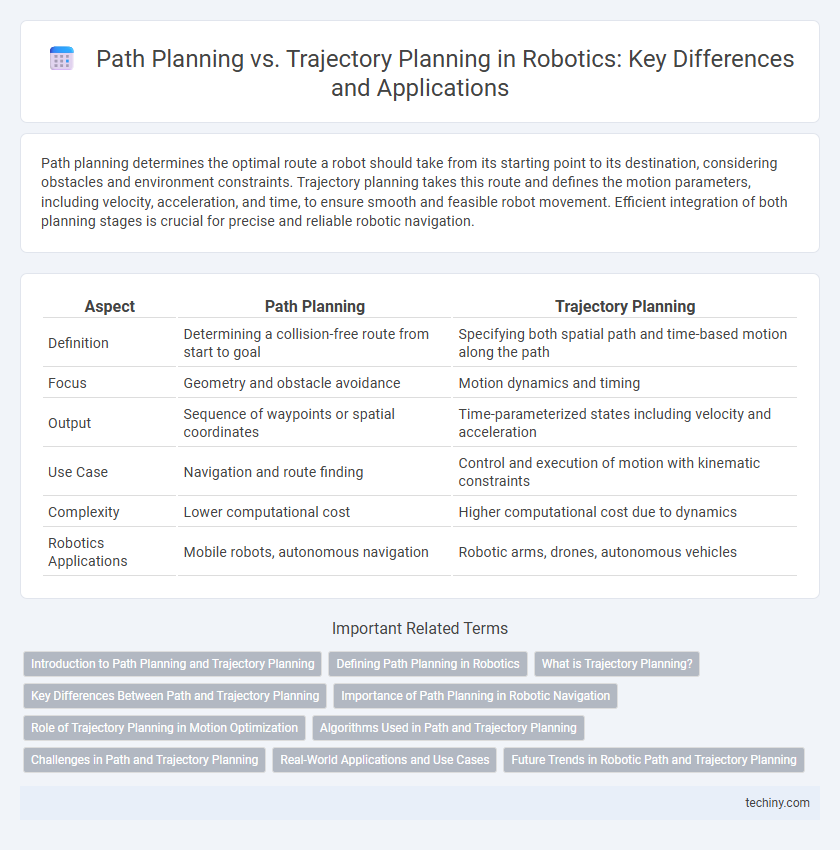
| Aspect | Path Planning | Trajectory Planning |
|---|---|---|
| Definition | Determining a collision-free route from start to goal | Specifying both spatial path and time-based motion along the path |
| Focus | Geometry and obstacle avoidance | Motion dynamics and timing |
| Output | Sequence of waypoints or spatial coordinates | Time-parameterized states including velocity and acceleration |
| Use Case | Navigation and route finding | Control and execution of motion with kinematic constraints |
| Complexity | Lower computational cost | Higher computational cost due to dynamics |
| Robotics Applications | Mobile robots, autonomous navigation | Robotic arms, drones, autonomous vehicles |
Introduction to Path Planning and Trajectory Planning
Path planning involves determining a feasible route from a start point to a target within the robot's environment, considering obstacles and spatial constraints. Trajectory planning focuses on defining the precise motion parameters like velocity, acceleration, and timing along the path to ensure smooth and efficient robot movement. Effective integration of path and trajectory planning enhances robotic navigation by optimizing both route feasibility and dynamic execution.
Defining Path Planning in Robotics
Path planning in robotics involves determining a collision-free route from an initial position to a target location within a given environment, focusing on spatial feasibility without accounting for time-dependent constraints. This process uses algorithms like A*, Dijkstra's, and RRT to generate optimal or near-optimal paths based on the robot's kinematic and environmental constraints. Effective path planning ensures safe navigation around obstacles, laying the foundation for subsequent trajectory planning that integrates velocity and timing parameters for execution.
What is Trajectory Planning?
Trajectory planning in robotics involves generating a time-parameterized path that defines the specific positions, velocities, and accelerations of a robot's end-effector or joints over time. It focuses on ensuring smooth and feasible motion by considering kinematic constraints, dynamic limits, and obstacle avoidance, optimizing for factors like energy efficiency or execution time. Unlike path planning, which determines the geometric route alone, trajectory planning integrates temporal aspects to enable precise control during robot movement.
Key Differences Between Path and Trajectory Planning
Path planning determines the optimal spatial route a robot must follow to move from a start point to a goal, focusing on obstacle avoidance and environment mapping. Trajectory planning specifies the timing and velocity profiles along the predetermined path, ensuring smooth motion control and adherence to kinematic constraints. The key difference lies in path planning addressing "where" the robot moves, while trajectory planning defines "how" and "when" it moves along that path.
Importance of Path Planning in Robotic Navigation
Path planning is crucial in robotic navigation as it determines a collision-free route from the start to the goal position, optimizing safety and efficiency. Unlike trajectory planning, which focuses on the timing and velocity profiles along the path, path planning establishes the geometric pathway that avoids obstacles and respects environmental constraints. Effective path planning algorithms such as A*, RRT, and Dijkstra's enable robots to operate autonomously in complex, dynamic environments by providing reliable spatial guidance.
Role of Trajectory Planning in Motion Optimization
Trajectory planning plays a crucial role in motion optimization by determining the precise timing and velocity at each point along a robot's path to ensure smooth and efficient movement. Unlike path planning, which focuses on the spatial route, trajectory planning optimizes dynamic parameters such as acceleration and jerk to minimize energy consumption and avoid mechanical stress. This optimization enhances robot performance, safety, and accuracy in complex tasks such as autonomous navigation and robotic manipulation.
Algorithms Used in Path and Trajectory Planning
Path planning algorithms commonly include A*, Dijkstra's, and Rapidly-exploring Random Trees (RRT), which focus on finding feasible routes from start to goal while avoiding obstacles. Trajectory planning employs algorithms like Polynomial Interpolation, B-splines, and Model Predictive Control (MPC) to generate smooth, time-parameterized movements that consider the robot's kinematic and dynamic constraints. Both approaches integrate optimization techniques to enhance efficiency, safety, and precision in robotic motion.
Challenges in Path and Trajectory Planning
Path planning involves determining a collision-free route from start to goal, while trajectory planning specifies the timing and control inputs along that path. Challenges in path planning include navigating complex environments with dynamic obstacles and ensuring completeness and optimality under computational constraints. Trajectory planning faces difficulties in generating smooth, feasible motions that respect robot dynamics, kinematics, and actuator limits for precise execution.
Real-World Applications and Use Cases
Path planning determines the optimal route for a robot to navigate from start to goal, crucial in warehouse automation for obstacle avoidance and efficient item retrieval. Trajectory planning refines this route by defining the robot's precise motions over time, essential in autonomous vehicles to ensure smooth accelerations, safe turns, and compliance with traffic regulations. Real-world applications benefit from integrating both, as seen in surgical robots where path planning maps safe instrument routes while trajectory planning controls delicate movements to minimize tissue damage.
Future Trends in Robotic Path and Trajectory Planning
Future trends in robotic path and trajectory planning emphasize the integration of artificial intelligence and machine learning to enhance adaptability and real-time decision-making in dynamic environments. Research is progressing towards developing hybrid algorithms that combine global path planning with local trajectory optimization to improve efficiency and collision avoidance. Advances in sensor fusion and high-performance computing enable more precise and autonomous navigation for complex robotic systems in areas such as autonomous vehicles and industrial automation.
path planning vs trajectory planning Infographic