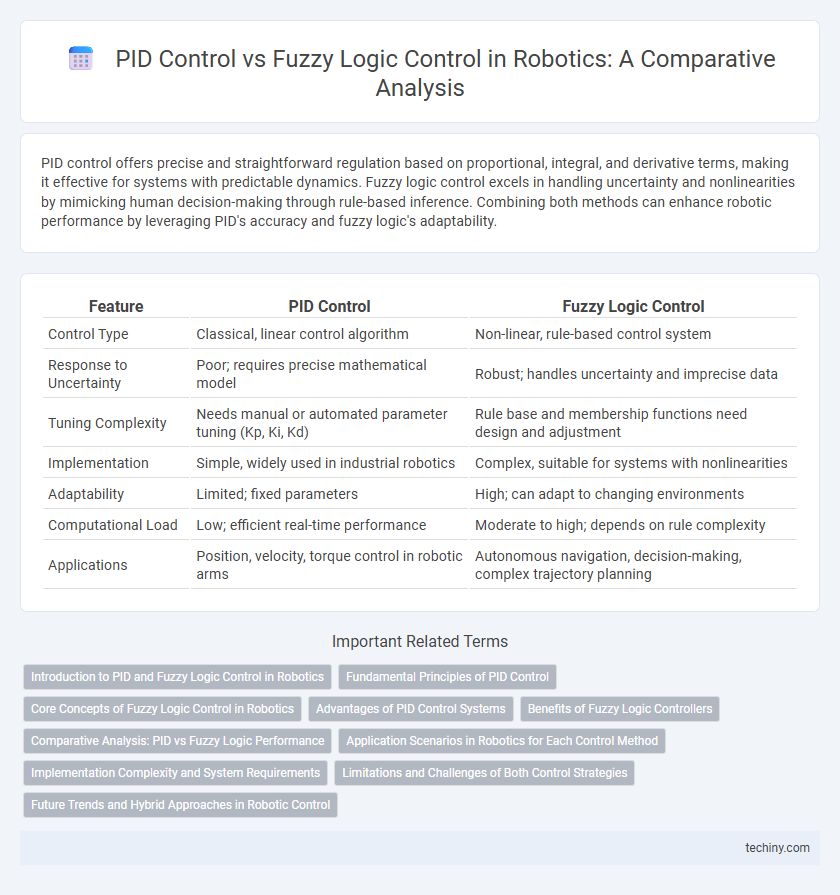
PID control offers precise and straightforward regulation based on proportional, integral, and derivative terms, making it effective for systems with predictable dynamics. Fuzzy logic control excels in handling uncertainty and nonlinearities by mimicking human decision-making through rule-based inference. Combining both methods can enhance robotic performance by leveraging PID's accuracy and fuzzy logic's adaptability.
Table of Comparison
| Feature | PID Control | Fuzzy Logic Control |
|---|---|---|
| Control Type | Classical, linear control algorithm | Non-linear, rule-based control system |
| Response to Uncertainty | Poor; requires precise mathematical model | Robust; handles uncertainty and imprecise data |
| Tuning Complexity | Needs manual or automated parameter tuning (Kp, Ki, Kd) | Rule base and membership functions need design and adjustment |
| Implementation | Simple, widely used in industrial robotics | Complex, suitable for systems with nonlinearities |
| Adaptability | Limited; fixed parameters | High; can adapt to changing environments |
| Computational Load | Low; efficient real-time performance | Moderate to high; depends on rule complexity |
| Applications | Position, velocity, torque control in robotic arms | Autonomous navigation, decision-making, complex trajectory planning |
Introduction to PID and Fuzzy Logic Control in Robotics
PID control in robotics utilizes proportional, integral, and derivative terms to minimize error by adjusting the system output, offering simplicity and ease of implementation for precise motion control. Fuzzy logic control mimics human reasoning by using linguistic variables and fuzzy sets to handle uncertainty and nonlinearity in robotic systems, enabling adaptive and robust decision-making in complex environments. Combining PID and fuzzy logic can enhance robot performance by blending precise error correction with flexible, intuitive control strategies.
Fundamental Principles of PID Control
PID control relies on proportional, integral, and derivative terms to minimize error by continuously adjusting system inputs based on past, present, and predicted future states. The proportional component addresses the current error magnitude, the integral accounts for accumulated errors over time, and the derivative predicts future trends by evaluating the error rate of change. This control approach offers precise and stable regulation in robotic systems by optimizing response speed and minimizing steady-state error.
Core Concepts of Fuzzy Logic Control in Robotics
Fuzzy logic control in robotics leverages linguistic variables and membership functions to handle uncertainty and imprecision in sensor data, enabling smoother and more adaptive decision-making compared to traditional PID control, which relies on precise mathematical models. Core concepts include rule-based inference systems that mimic human reasoning through if-then rules, allowing robots to perform complex tasks in dynamic environments without requiring exact measurements. The flexibility of fuzzy logic control systems makes them particularly effective for nonlinear and time-variant robotic processes, enhancing robustness and control performance.
Advantages of PID Control Systems
PID control systems offer precise regulation of robotic movements through proportional, integral, and derivative actions that minimize steady-state error and improve stability. Their well-established mathematical foundation ensures ease of implementation, tuning, and robustness in various industrial robotics applications. Compared to fuzzy logic control, PID controllers provide faster computational performance and greater predictability for linear and time-invariant processes.
Benefits of Fuzzy Logic Controllers
Fuzzy logic controllers offer significant benefits in robotics by handling nonlinear systems and uncertainties more effectively than traditional PID control. They provide adaptive control without requiring a precise mathematical model, allowing robots to perform better in complex and dynamic environments. This flexibility improves robustness and enhances real-time decision-making for tasks such as navigation and manipulation.
Comparative Analysis: PID vs Fuzzy Logic Performance
PID control offers precise, mathematically grounded regulation ideal for linear, time-invariant robotic systems, ensuring quick response and stability. Fuzzy logic control excels in handling nonlinearities and uncertainties, providing adaptive decision-making without requiring an accurate model. Comparative performance reveals PID's strengths in predictable environments, while fuzzy logic outperforms in complex, dynamic conditions demanding robustness and flexibility.
Application Scenarios in Robotics for Each Control Method
PID control excels in applications requiring precise, stable, and predictable responses, such as robotic arm positioning and motor speed regulation, where system dynamics are well understood. Fuzzy logic control is advantageous in complex, nonlinear environments like autonomous mobile robots and human-robot interaction, where uncertainty and imprecise data demand adaptive decision-making. In robotic assembly lines, PID ensures consistent repetitive tasks, while fuzzy logic enhances adaptability in unstructured and dynamic settings.
Implementation Complexity and System Requirements
PID control features straightforward implementation with minimal computational resources, making it suitable for systems with limited processing power and clear mathematical models. Fuzzy logic control requires more complex programming and higher computational capacity due to its reliance on expert knowledge and rule-based inference, which enhances adaptability in uncertain environments. System requirements for fuzzy logic include extensive tuning and higher memory usage, contrasting with PID's simpler parameter adjustment and real-time response efficiency.
Limitations and Challenges of Both Control Strategies
PID control in robotics faces limitations such as poor performance in nonlinear or time-varying systems and sensitivity to parameter tuning, leading to steady-state errors and overshoot. Fuzzy logic control struggles with the challenge of designing appropriate membership functions and rule sets, which can be subjective and computationally intensive, affecting real-time performance. Both strategies require careful calibration and may be inadequate in highly complex or uncertain robotic environments, necessitating hybrid or adaptive control approaches.
Future Trends and Hybrid Approaches in Robotic Control
Hybrid control systems combining PID control and fuzzy logic leverage the precision of PID with the adaptability of fuzzy inference for enhanced robotic performance. Future trends emphasize integrating machine learning to optimize fuzzy rule sets alongside adaptive PID parameters, enabling robots to handle complex, dynamic environments with improved accuracy and robustness. This convergence facilitates real-time decision-making in autonomous systems, pushing the boundaries of intelligent robotic control.
PID control vs fuzzy logic control Infographic