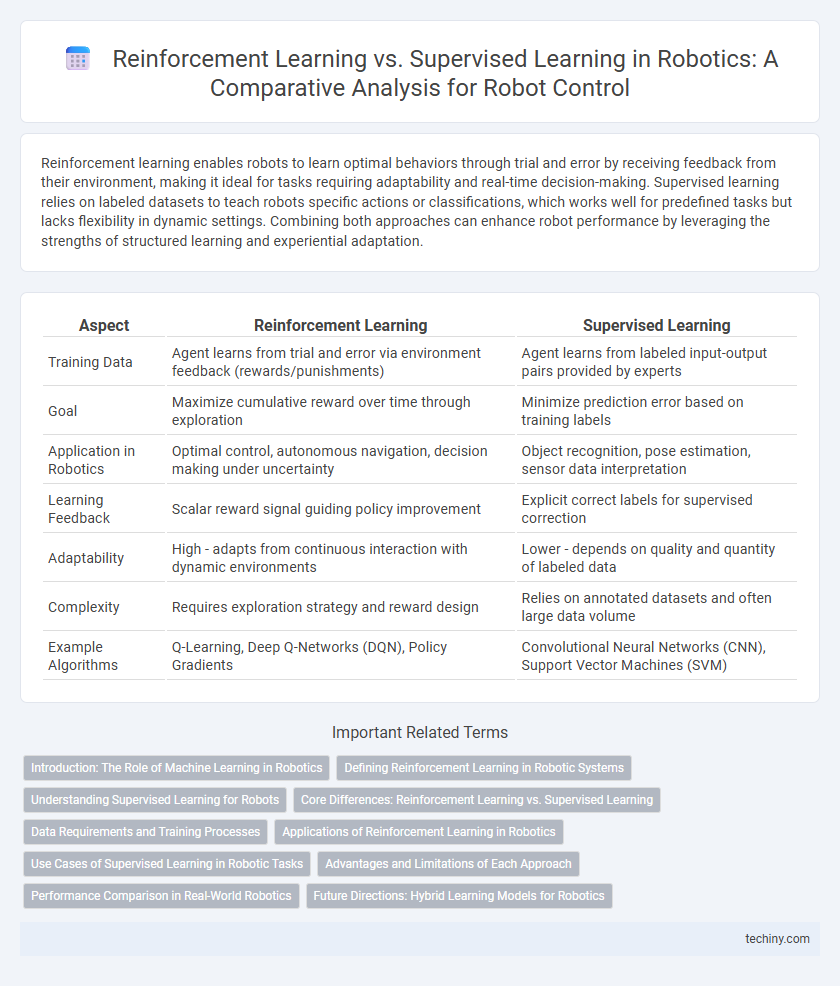
Reinforcement learning enables robots to learn optimal behaviors through trial and error by receiving feedback from their environment, making it ideal for tasks requiring adaptability and real-time decision-making. Supervised learning relies on labeled datasets to teach robots specific actions or classifications, which works well for predefined tasks but lacks flexibility in dynamic settings. Combining both approaches can enhance robot performance by leveraging the strengths of structured learning and experiential adaptation.
Table of Comparison
| Aspect | Reinforcement Learning | Supervised Learning |
|---|---|---|
| Training Data | Agent learns from trial and error via environment feedback (rewards/punishments) | Agent learns from labeled input-output pairs provided by experts |
| Goal | Maximize cumulative reward over time through exploration | Minimize prediction error based on training labels |
| Application in Robotics | Optimal control, autonomous navigation, decision making under uncertainty | Object recognition, pose estimation, sensor data interpretation |
| Learning Feedback | Scalar reward signal guiding policy improvement | Explicit correct labels for supervised correction |
| Adaptability | High - adapts from continuous interaction with dynamic environments | Lower - depends on quality and quantity of labeled data |
| Complexity | Requires exploration strategy and reward design | Relies on annotated datasets and often large data volume |
| Example Algorithms | Q-Learning, Deep Q-Networks (DQN), Policy Gradients | Convolutional Neural Networks (CNN), Support Vector Machines (SVM) |
Introduction: The Role of Machine Learning in Robotics
Machine learning enables robots to adapt and improve performance through data-driven experience, with supervised learning relying on labeled datasets for precise task execution. Reinforcement learning allows robots to learn optimal behaviors by interacting with environments and receiving feedback, fostering autonomy in dynamic settings. Both approaches play crucial roles in advancing robotic capabilities for complex real-world applications.
Defining Reinforcement Learning in Robotic Systems
Reinforcement learning in robotic systems involves training robots to make sequential decisions by interacting with their environment and receiving feedback in the form of rewards or penalties. This approach enables robots to learn optimal behaviors through trial and error without requiring labeled datasets, unlike supervised learning which depends on predefined input-output pairs. By continuously improving policies based on reward-driven experiences, reinforcement learning allows robots to adapt to dynamic and complex tasks with greater autonomy.
Understanding Supervised Learning for Robots
Supervised learning for robots involves training algorithms on labeled datasets, enabling robots to recognize patterns and make decisions based on input-output examples. This approach excels in tasks requiring precise mappings from sensory inputs to actions, such as object recognition or gesture classification. Compared to reinforcement learning, supervised learning relies heavily on the availability of extensive and accurately labeled data for effective robot performance.
Core Differences: Reinforcement Learning vs. Supervised Learning
Reinforcement learning enables robots to learn optimal actions through trial and error by interacting with their environment and receiving feedback in the form of rewards or penalties, whereas supervised learning relies on labeled datasets where input-output pairs guide the robot's behavior. Unlike supervised learning, which requires extensive pre-collected data, reinforcement learning is suited for dynamic, real-time decision-making tasks in robotics where explicit output labels are unavailable. Core differences revolve around feedback type, data dependency, and the ability to adapt autonomously during robotic task execution.
Data Requirements and Training Processes
Reinforcement learning in robotics relies on trial-and-error interactions with the environment, requiring extensive exploration and feedback signals to optimize decision-making policies without explicit labeled data. Supervised learning depends on large datasets of pre-labeled examples, enabling robots to learn specific tasks faster but often limiting adaptability to new scenarios. The training process in reinforcement learning is typically more time-consuming due to continuous learning and reward evaluation, while supervised learning allows quicker convergence through direct error correction.
Applications of Reinforcement Learning in Robotics
Reinforcement learning enables robots to autonomously adapt to complex environments by trial-and-error interactions, excelling in tasks like robotic grasping, locomotion, and autonomous navigation. Unlike supervised learning, which relies on labeled datasets, reinforcement learning continuously improves robot performance through reward-based feedback, making it ideal for dynamic, real-world applications. This approach supports robotic systems in optimizing decision-making processes for industrial automation, robotic manipulation, and cooperative multi-robot systems.
Use Cases of Supervised Learning in Robotic Tasks
Supervised learning in robotics excels in tasks requiring precise object recognition, such as identifying components for assembly lines or sorting packages in warehouses. It enables robots to learn from labeled datasets, improving accuracy in vision-based manipulation and navigation in structured environments. This method is effective for repetitive tasks where clear input-output mappings are available, enhancing performance consistency in industrial automation.
Advantages and Limitations of Each Approach
Reinforcement learning enables robots to autonomously learn optimal behaviors through trial-and-error interactions with the environment, which is advantageous for tasks involving dynamic, uncertain conditions but can require extensive training time and computational resources. Supervised learning provides robots with the ability to quickly generalize from labeled datasets, making it effective for precise object recognition and classification, yet it depends heavily on the quality and quantity of labeled data, limiting adaptability to novel scenarios. Balancing these approaches allows leveraging reinforcement learning's adaptability and supervised learning's efficiency, optimizing robot performance across diverse applications.
Performance Comparison in Real-World Robotics
Reinforcement learning (RL) in robotics demonstrates superior adaptability by enabling robots to learn optimal actions through trial and error in dynamic environments, outperforming supervised learning which relies heavily on pre-labeled datasets and struggles with real-world variability. RL-equipped robots achieve higher efficiency and resilience in tasks like navigation and manipulation by continuously improving policies based on reward feedback, while supervised learning models often face issues with generalization and require extensive retraining. Performance benchmarks reveal that reinforcement learning yields more robust autonomy and scalability in robots operating under unstructured conditions compared to the static predictive capabilities of supervised learning.
Future Directions: Hybrid Learning Models for Robotics
Hybrid learning models that combine reinforcement learning and supervised learning are emerging as a promising approach for advancing robotics. These models leverage supervised learning's efficiency in pattern recognition and reinforcement learning's adaptability in dynamic environments, enabling more robust and autonomous robot behavior. Future research is focused on optimizing the integration of these methods to enhance real-time decision-making and adaptability in complex robotic tasks.
Reinforcement learning vs Supervised learning (for robots) Infographic