Robot simulation enables rapid testing and modification of design parameters within virtual environments, significantly reducing development costs and time. Physical prototyping provides tangible feedback on real-world interactions, essential for validating sensor accuracy and mechanical durability. Combining both approaches enhances the reliability and efficiency of robotic system development.
Table of Comparison
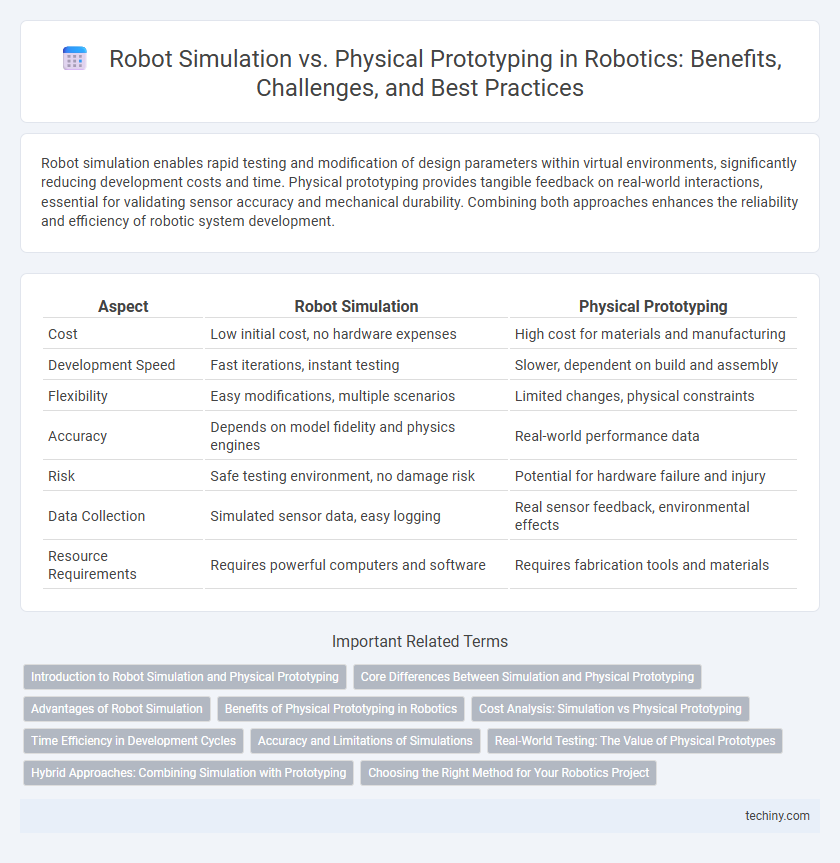
| Aspect | Robot Simulation | Physical Prototyping |
|---|---|---|
| Cost | Low initial cost, no hardware expenses | High cost for materials and manufacturing |
| Development Speed | Fast iterations, instant testing | Slower, dependent on build and assembly |
| Flexibility | Easy modifications, multiple scenarios | Limited changes, physical constraints |
| Accuracy | Depends on model fidelity and physics engines | Real-world performance data |
| Risk | Safe testing environment, no damage risk | Potential for hardware failure and injury |
| Data Collection | Simulated sensor data, easy logging | Real sensor feedback, environmental effects |
| Resource Requirements | Requires powerful computers and software | Requires fabrication tools and materials |
Introduction to Robot Simulation and Physical Prototyping
Robot simulation enables rapid testing and validation of algorithms in a virtual environment, reducing time and costs associated with physical trials. Physical prototyping involves constructing actual robot models to assess real-world performance, sensor interactions, and mechanical behaviors. Combining both approaches enhances design accuracy, accelerates development cycles, and mitigates risk in robotics projects.
Core Differences Between Simulation and Physical Prototyping
Robot simulation offers a virtual environment for testing algorithms and designs quickly, reducing costs and enabling rapid iterations without material wear or safety risks. Physical prototyping provides tangible feedback, revealing real-world factors like friction, sensor noise, and hardware limitations that simulations may overlook. Combining both approaches leverages accurate data from prototypes and flexible testing from simulations to optimize robotic system development.
Advantages of Robot Simulation
Robot simulation offers significant cost savings by eliminating the need for expensive physical prototypes and reducing material waste. It enables rapid testing and iteration of robot designs in diverse virtual environments, accelerating development cycles and improving accuracy. Simulation also enhances safety by allowing engineers to identify and resolve potential issues before deploying robots in real-world scenarios.
Benefits of Physical Prototyping in Robotics
Physical prototyping in robotics offers tangible interaction with real-world variables, enabling precise testing of mechanical durability and sensor accuracy under dynamic conditions. It facilitates immediate identification of unforeseen issues such as material wear, thermal effects, and electromagnetic interference, which are often difficult to model accurately in simulations. This hands-on approach accelerates iterative design improvements, ensuring reliability and performance in practical robotic applications.
Cost Analysis: Simulation vs Physical Prototyping
Robot simulation significantly reduces initial costs by eliminating the need for expensive physical components and iterative manufacturing processes. Physical prototyping incurs higher expenses due to material consumption, assembly labor, and potential design reworks. Simulation enables virtual testing and optimization, providing cost-effective risk assessment before committing resources to physical builds.
Time Efficiency in Development Cycles
Robot simulation significantly reduces development cycles by allowing rapid iterations and immediate testing of control algorithms without the need for physical assembly. Physical prototyping, while essential for real-world validation, often involves lengthy fabrication and setup times that delay feedback. Leveraging simulation tools accelerates time efficiency, enabling developers to optimize designs and code before committing to costly and time-consuming physical prototypes.
Accuracy and Limitations of Simulations
Robot simulation offers high precision in modeling complex robotic behaviors and environmental interactions, enabling rapid testing of algorithms without physical wear and resource costs. Despite advanced physics engines, simulations often lack the nuanced variables of real-world dynamics such as sensor noise, unmodeled friction, and unexpected material interactions, limiting their absolute accuracy. Physical prototyping captures these unpredictable factors, providing indispensable validation and calibration for robotic systems that simulations alone cannot fully replicate.
Real-World Testing: The Value of Physical Prototypes
Physical prototypes in robotics enable real-world testing that captures unpredictable environmental factors and material interactions often missed in simulations. They provide crucial tactile feedback and validate sensor accuracy under actual operating conditions, ensuring robustness and safety. This hands-on evaluation accelerates iterative design improvements and reduces costly errors before full-scale manufacturing.
Hybrid Approaches: Combining Simulation with Prototyping
Hybrid approaches in robotics integrate robot simulation with physical prototyping to leverage the strengths of both methods for enhanced development efficiency. Simulation enables rapid iteration and testing of complex algorithms in virtual environments, reducing time and cost, while physical prototyping validates real-world performance and uncovers unforeseen interactions. Combining these techniques accelerates design optimization, improves system reliability, and facilitates seamless transitions from virtual models to functional robots.
Choosing the Right Method for Your Robotics Project
Robot simulation offers cost-effective, rapid testing and iteration with virtual environments that replicate real-world physics, enabling developers to identify and fix design flaws early. Physical prototyping provides tangible feedback and real-world data crucial for validating robot performance under actual operating conditions. Choosing the right method depends on project goals, budget constraints, and the need for precise environmental interactions to ensure efficient development and successful deployment.
Robot simulation vs Physical prototyping Infographic