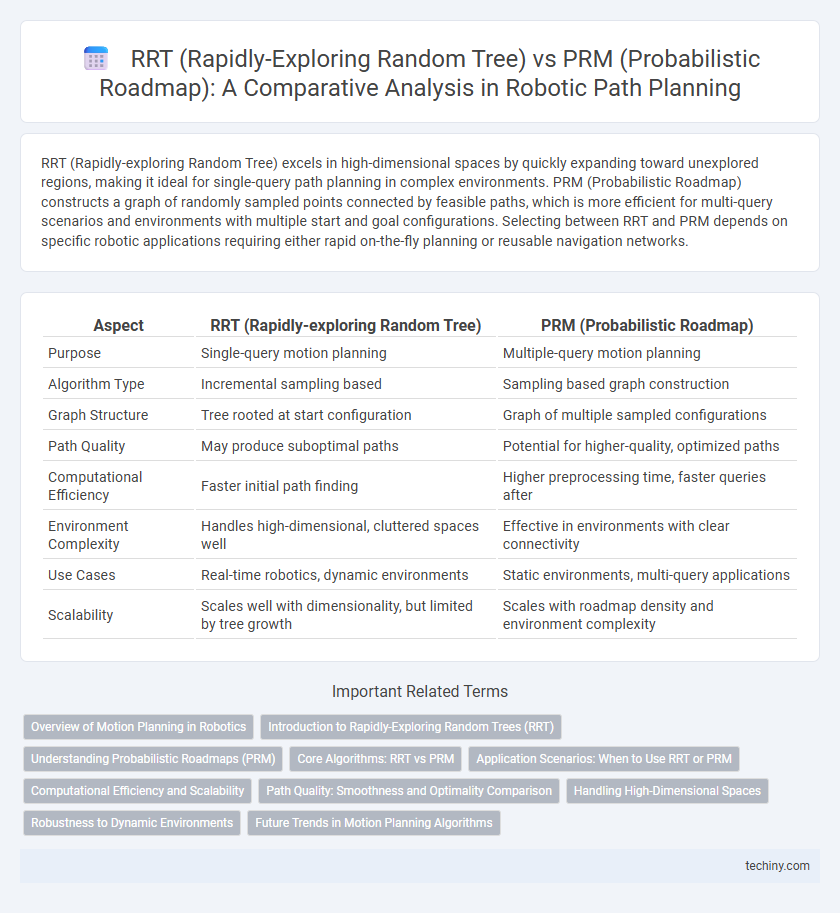
RRT (Rapidly-exploring Random Tree) excels in high-dimensional spaces by quickly expanding toward unexplored regions, making it ideal for single-query path planning in complex environments. PRM (Probabilistic Roadmap) constructs a graph of randomly sampled points connected by feasible paths, which is more efficient for multi-query scenarios and environments with multiple start and goal configurations. Selecting between RRT and PRM depends on specific robotic applications requiring either rapid on-the-fly planning or reusable navigation networks.
Table of Comparison
| Aspect | RRT (Rapidly-exploring Random Tree) | PRM (Probabilistic Roadmap) |
|---|---|---|
| Purpose | Single-query motion planning | Multiple-query motion planning |
| Algorithm Type | Incremental sampling based | Sampling based graph construction |
| Graph Structure | Tree rooted at start configuration | Graph of multiple sampled configurations |
| Path Quality | May produce suboptimal paths | Potential for higher-quality, optimized paths |
| Computational Efficiency | Faster initial path finding | Higher preprocessing time, faster queries after |
| Environment Complexity | Handles high-dimensional, cluttered spaces well | Effective in environments with clear connectivity |
| Use Cases | Real-time robotics, dynamic environments | Static environments, multi-query applications |
| Scalability | Scales well with dimensionality, but limited by tree growth | Scales with roadmap density and environment complexity |
Overview of Motion Planning in Robotics
RRT (Rapidly-exploring Random Tree) efficiently explores high-dimensional spaces by incrementally building a tree rooted at the start configuration, optimizing pathfinding in complex, dynamic environments. PRM (Probabilistic Roadmap) constructs a graph of random collision-free configurations connected by simple paths, excelling in multi-query scenarios within static environments. Both algorithms address the challenges of motion planning by balancing exploration and exploitation, but RRT is favored for single-query problems, while PRM is preferred for environments requiring multiple path computations.
Introduction to Rapidly-Exploring Random Trees (RRT)
Rapidly-Exploring Random Trees (RRT) are path planning algorithms designed to efficiently explore high-dimensional spaces by incrementally building a space-filling tree. Unlike Probabilistic Roadmaps (PRM), which create a graph of random samples and connect nodes offline, RRTs grow trees in real-time by sampling random points and extending the nearest tree vertex toward these points. This makes RRT particularly suitable for single-query planning tasks in complex, constrained robotic environments.
Understanding Probabilistic Roadmaps (PRM)
Probabilistic Roadmaps (PRM) generate a network of random nodes connected by feasible paths, efficiently representing high-dimensional configuration spaces for robot motion planning. PRM excels in multi-query environments by precomputing a roadmap to quickly find paths between different start and goal configurations. Its effectiveness depends on the sampling density and the ability to capture connectivity in complex spaces, making it well-suited for path planning in robotics with complex obstacles.
Core Algorithms: RRT vs PRM
RRT (Rapidly-exploring Random Tree) excels in single-query path planning by incrementally building a tree that rapidly explores high-dimensional spaces, making it highly efficient for dynamic environments and complex constraints. PRM (Probabilistic Roadmap) constructs a graph of randomly sampled collision-free configurations during a preprocessing phase, excelling in multi-query scenarios by facilitating fast path searches once the roadmap is built. RRT optimizes exploration with a bias toward unexplored regions, while PRM emphasizes thorough environment coverage and connectivity through random sampling and graph construction.
Application Scenarios: When to Use RRT or PRM
RRT excels in high-dimensional, dynamic environments requiring fast, incremental path planning for single-query problems, such as real-time robot navigation and manipulation tasks. PRM is more suitable for static or semi-static environments where multiple path queries are needed, benefiting from its precomputed roadmap for efficient multi-query planning in complex spaces like factory automation or large-scale mapping. Choosing between RRT and PRM depends on the scenario's dimensionality, workspace dynamics, and the demand for single versus multiple path queries.
Computational Efficiency and Scalability
RRT (Rapidly-exploring Random Tree) excels in computational efficiency for single-query path planning due to its incremental tree growth and exploration of high-dimensional spaces with low memory requirements. PRM (Probabilistic Roadmap) offers superior scalability for multi-query environments by precomputing a roadmap, which enables faster subsequent path searches but demands higher upfront computational cost and memory usage. RRT's adaptive sampling handles complex, dynamic environments more efficiently, while PRM is preferable for static, large-scale settings requiring repeated queries.
Path Quality: Smoothness and Optimality Comparison
RRT (Rapidly-exploring Random Tree) generally produces rapid, feasible paths but often lacks smoothness and optimality, requiring post-processing to improve path quality. PRM (Probabilistic Roadmap) excels in finding more optimal and smoother paths by sampling multiple configurations and leveraging graph search algorithms for global path optimization. Studies show PRM achieves higher path quality in complex environments where smoothness and minimal travel cost are critical for robotic motion planning.
Handling High-Dimensional Spaces
RRT (Rapidly-exploring Random Tree) excels in handling high-dimensional spaces by incrementally building a tree that rapidly explores unexplored regions, making it suitable for online path planning in complex robotic systems. PRM (Probabilistic Roadmap) constructs a network of sampled configurations offline, which can become computationally expensive and less efficient as dimensionality increases. In high-dimensional robotic motion planning, RRT's ability to adaptively explore the search space outperforms PRM in terms of scalability and real-time performance.
Robustness to Dynamic Environments
RRT (Rapidly-exploring random tree) demonstrates superior robustness in dynamic environments due to its incremental tree expansion and real-time replanning capabilities, allowing quick adaptation to changing obstacles and moving targets. PRM (Probabilistic Roadmap) relies on a precomputed roadmap, which can limit its flexibility and responsiveness when environment changes are frequent and unpredictable. Therefore, RRT is generally preferred for applications requiring ongoing adjustment in complex, time-variant spaces such as autonomous navigation and robotic manipulation in dynamic settings.
Future Trends in Motion Planning Algorithms
Future trends in motion planning algorithms emphasize the integration of machine learning techniques with RRT and PRM to enhance real-time adaptability and sampling efficiency. Research is focused on hybrid frameworks that combine RRT's rapid exploration capabilities with PRM's global roadmap structure for improved navigation in dynamic and high-dimensional environments. Advances in sensor fusion and computational power are enabling these algorithms to handle increasingly complex robotic tasks with higher precision and robustness.
RRT (Rapidly-exploring random tree) vs PRM (Probabilistic roadmap) Infographic