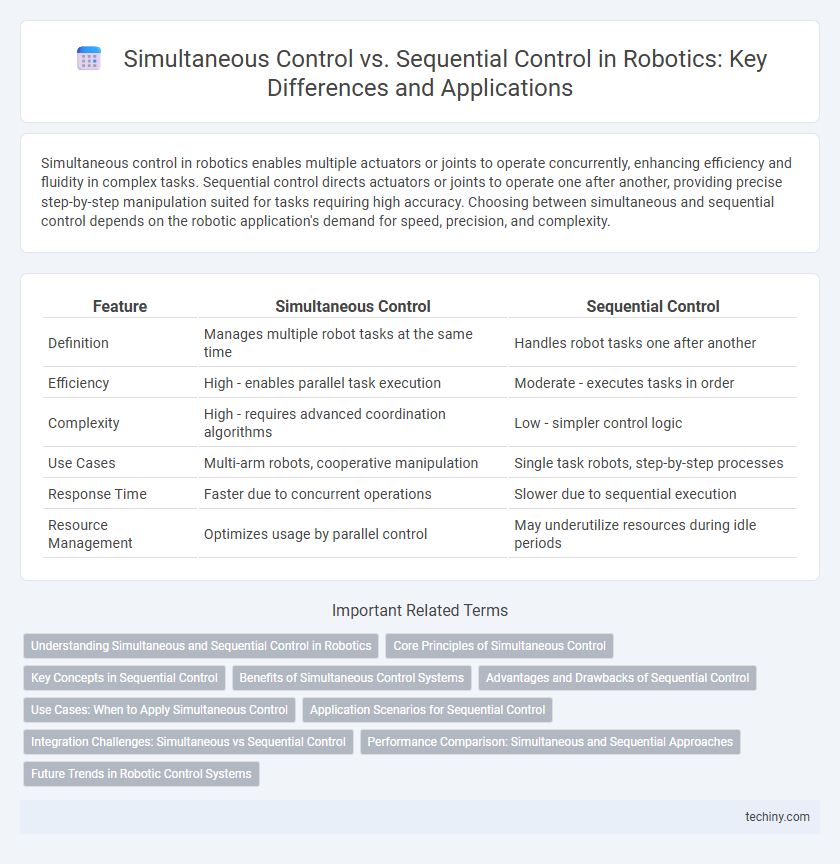
Simultaneous control in robotics enables multiple actuators or joints to operate concurrently, enhancing efficiency and fluidity in complex tasks. Sequential control directs actuators or joints to operate one after another, providing precise step-by-step manipulation suited for tasks requiring high accuracy. Choosing between simultaneous and sequential control depends on the robotic application's demand for speed, precision, and complexity.
Table of Comparison
| Feature | Simultaneous Control | Sequential Control |
|---|---|---|
| Definition | Manages multiple robot tasks at the same time | Handles robot tasks one after another |
| Efficiency | High - enables parallel task execution | Moderate - executes tasks in order |
| Complexity | High - requires advanced coordination algorithms | Low - simpler control logic |
| Use Cases | Multi-arm robots, cooperative manipulation | Single task robots, step-by-step processes |
| Response Time | Faster due to concurrent operations | Slower due to sequential execution |
| Resource Management | Optimizes usage by parallel control | May underutilize resources during idle periods |
Understanding Simultaneous and Sequential Control in Robotics
Simultaneous control in robotics enables multiple actuators or joints to operate concurrently, enhancing efficiency and fluidity in complex tasks such as multi-limbed manipulation or coordinated drone flight. Sequential control dictates execution of movements one at a time, which simplifies programming and troubleshooting but may reduce overall task speed and adaptability. Understanding the trade-offs between simultaneous and sequential control strategies is critical for optimizing robotic system performance in applications ranging from industrial automation to autonomous navigation.
Core Principles of Simultaneous Control
Simultaneous control in robotics enables multiple actuators or joints to operate concurrently, enhancing coordination and fluidity in complex tasks. Core principles include real-time feedback integration, decentralized control architectures, and continuous error correction to maintain precise motion trajectories. This approach significantly improves the robot's adaptability and efficiency compared to sequential control, which processes actions one at a time.
Key Concepts in Sequential Control
Sequential control in robotics involves the execution of discrete, step-by-step instructions where each action depends on the completion of the previous one, emphasizing precise timing and order. Key concepts include state machines, where the system transitions through predefined states based on specific inputs or conditions, ensuring predictable and repeatable robot behavior. This method is ideal for processes requiring strict operation sequences, such as assembly lines or automated inspection tasks, where the control logic governs the exact progression from one task to the next.
Benefits of Simultaneous Control Systems
Simultaneous control systems in robotics enhance efficiency by coordinating multiple actuators concurrently, reducing operation time and improving task precision. They enable smoother and more adaptive robotic movements, crucial for complex environments requiring real-time adjustments. Advanced algorithms integrated with simultaneous control optimize energy consumption and reduce mechanical wear, extending the lifespan of robotic components.
Advantages and Drawbacks of Sequential Control
Sequential control in robotics offers simplicity and ease of programming, making it ideal for tasks with well-defined steps and low complexity. However, it lacks flexibility and responsiveness, often leading to inefficiencies in dynamic environments where simultaneous actions could optimize performance. The main drawback is its inability to handle concurrent operations, limiting productivity in advanced robotic applications requiring parallel processing.
Use Cases: When to Apply Simultaneous Control
Simultaneous control is essential in robotics applications requiring real-time coordination of multiple actuators, such as humanoid robots performing complex tasks, robotic arms in assembly lines, and autonomous vehicles navigating dynamic environments. This control strategy enhances efficiency and precision by managing multiple degrees of freedom concurrently, enabling smoother and faster responses. Use cases involving intricate manipulation, balance maintenance, and multi-joint synchronization benefit significantly from simultaneous control over sequential control.
Application Scenarios for Sequential Control
Sequential control excels in robotic assembly lines requiring precise, step-by-step operations such as pick-and-place tasks, where each movement depends on the completion of the previous one. It is ideal for processes involving repetitive, linear workflows like packaging, welding, and painting in automotive manufacturing. This control method ensures accuracy and safety in applications where tasks must follow a strict order to prevent collisions or errors.
Integration Challenges: Simultaneous vs Sequential Control
Simultaneous control in robotics demands complex real-time data processing and synchronization across multiple actuators, creating integration challenges with sensor fusion and communication latency. Sequential control simplifies integration by executing actions step-by-step but may sacrifice responsiveness and efficiency in dynamic environments. Balancing these approaches requires advanced algorithms capable of mitigating latency while maintaining precise coordination for optimal robotic performance.
Performance Comparison: Simultaneous and Sequential Approaches
Simultaneous control in robotics enables multiple joints or actuators to operate concurrently, resulting in smoother and faster task execution compared to sequential control, which actuates components one after another. Performance benchmarks highlight that simultaneous approaches reduce completion time by up to 40% and improve trajectory accuracy by minimizing cumulative errors from sequential delays. Industrial robots implementing simultaneous control exhibit enhanced efficiency in complex tasks like assembly and welding, making them preferable for time-critical and precision-demanding applications.
Future Trends in Robotic Control Systems
Simultaneous control in robotic systems enables real-time coordination of multiple joints and actuators, enhancing responsiveness and precision in complex tasks compared to traditional sequential control methods. Future trends emphasize the integration of advanced AI algorithms and sensor fusion techniques to improve adaptive learning and autonomy, enabling robots to operate efficiently in dynamic, unstructured environments. Emerging control architectures will leverage edge computing and cloud connectivity to optimize performance, reduce latency, and support seamless human-robot collaboration.
Simultaneous control vs sequential control Infographic