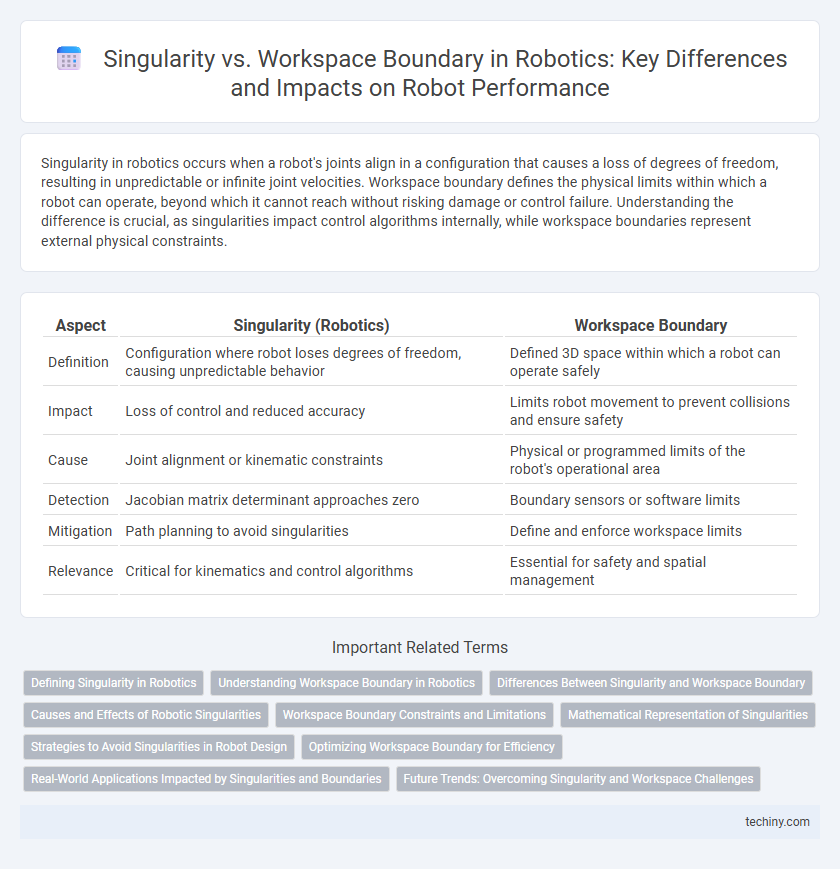
Singularity in robotics occurs when a robot's joints align in a configuration that causes a loss of degrees of freedom, resulting in unpredictable or infinite joint velocities. Workspace boundary defines the physical limits within which a robot can operate, beyond which it cannot reach without risking damage or control failure. Understanding the difference is crucial, as singularities impact control algorithms internally, while workspace boundaries represent external physical constraints.
Table of Comparison
| Aspect | Singularity (Robotics) | Workspace Boundary |
|---|---|---|
| Definition | Configuration where robot loses degrees of freedom, causing unpredictable behavior | Defined 3D space within which a robot can operate safely |
| Impact | Loss of control and reduced accuracy | Limits robot movement to prevent collisions and ensure safety |
| Cause | Joint alignment or kinematic constraints | Physical or programmed limits of the robot's operational area |
| Detection | Jacobian matrix determinant approaches zero | Boundary sensors or software limits |
| Mitigation | Path planning to avoid singularities | Define and enforce workspace limits |
| Relevance | Critical for kinematics and control algorithms | Essential for safety and spatial management |
Defining Singularity in Robotics
Singularity in robotics refers to specific configurations where a robot's end effector loses degrees of freedom, causing infinite solutions or uncontrollable movements. These singularities occur when the Jacobian matrix becomes rank-deficient, leading to loss of manipulability and control precision. Workspace boundary defines the physical limits of the robot's reach but does not inherently indicate singular configurations within that space.
Understanding Workspace Boundary in Robotics
Workspace boundary in robotics defines the physical limits within which a robot arm or manipulator can operate effectively, determined by joint constraints and link lengths. Understanding workspace boundary is crucial for optimizing robot task planning and avoiding collisions or unreachable targets, ensuring efficient and safe robot operation. Unlike singularity, which refers to configurations causing loss of motion control or infinite velocities, workspace boundaries set the spatial operational envelope for robotic movements.
Differences Between Singularity and Workspace Boundary
Singularity in robotics refers to configurations where the robot's Jacobian matrix loses rank, causing a loss of degrees of freedom and resulting in unpredictable or infinite joint velocities. Workspace boundary defines the physical limits within which a robot's end-effector can operate, restricted by its joint ranges and link lengths. The key difference lies in singularities representing kinematic and control challenges inside the workspace, whereas workspace boundaries impose geometric constraints on the robot's reachability.
Causes and Effects of Robotic Singularities
Robotic singularities occur when a manipulator's Jacobian matrix loses rank, causing infinite or undefined joint velocities, typically at configurations where the end-effector reaches the workspace boundary or aligns multiple axes. These singularities lead to loss of control precision, increased joint strain, and potential hardware damage due to unpredictable motion commands. Understanding and avoiding singularities is crucial for optimizing robot kinematics, ensuring smooth trajectory planning, and maintaining workspace efficiency.
Workspace Boundary Constraints and Limitations
Workspace boundary constraints in robotics define the physical limits within which a robot can operate, directly impacting its ability to reach singular configurations. These boundaries restrict the robot's end-effector movements, preventing it from achieving infinite velocities or unpredictable behaviors associated with singularities. Understanding and managing workspace boundaries is crucial to optimizing robot performance while avoiding control issues related to singularity points.
Mathematical Representation of Singularities
Singularities in robotics occur where the Jacobian matrix loses rank, causing the determinant to approach zero and resulting in undefined or infinite joint velocities. Workspace boundaries are defined by physical or joint limits but do not inherently correspond to singular configurations unless coinciding with Jacobian rank deficiency. Mathematical representation of singularities involves analyzing the Jacobian determinant det(J(q)) = 0, where q represents joint variables, distinguishing these critical points from the geometric limits of the workspace.
Strategies to Avoid Singularities in Robot Design
Singularity in robotics occurs when a robot's Jacobian matrix loses rank, causing a loss of control degrees of freedom and infinite joint velocities, which severely affects precision and stability. Workspace boundary defines the robot's operational range, where proximity to boundaries often increases the risk of singularities due to limited maneuvering space. Strategies to avoid singularities include optimizing the robot's kinematic configuration, incorporating redundancy to reroute motion around singular points, and implementing real-time singularity detection algorithms that adjust trajectories dynamically within the workspace.
Optimizing Workspace Boundary for Efficiency
Optimizing the workspace boundary in robotics enhances operational efficiency by maximizing the achievable positions and orientations within the robot's singularity-free zone. Preventing movements near singularity points reduces control instability and improves precision, enabling smoother trajectory planning and increased task reliability. Strategic boundary design integrates kinematic constraints to expand effective workspace utilization while maintaining optimal manipulator dexterity.
Real-World Applications Impacted by Singularities and Boundaries
Robotic singularities cause loss of control and infinite joint velocities, significantly impacting precision and safety in real-world applications like surgical robots and industrial automation. Workspace boundaries limit the robot's operational reach, restricting task flexibility and efficiency in environments such as assembly lines and warehouse logistics. Understanding and managing both singularities and workspace boundaries is critical for optimizing robotic performance and ensuring reliable operation in complex, dynamic settings.
Future Trends: Overcoming Singularity and Workspace Challenges
Future trends in robotics focus on overcoming singularity by enhancing kinematic redundancy and advanced control algorithms to maintain precise manipulator movement near singularity points. Innovative workspace boundary optimization techniques integrate adaptive path planning and dynamic obstacle avoidance, expanding operational ranges without compromising safety or efficiency. Integration of AI-driven predictive models enables real-time adjustments, addressing both singularity and workspace constraints to improve robot autonomy and versatility in complex environments.
Singularity (robotics) vs Workspace boundary Infographic