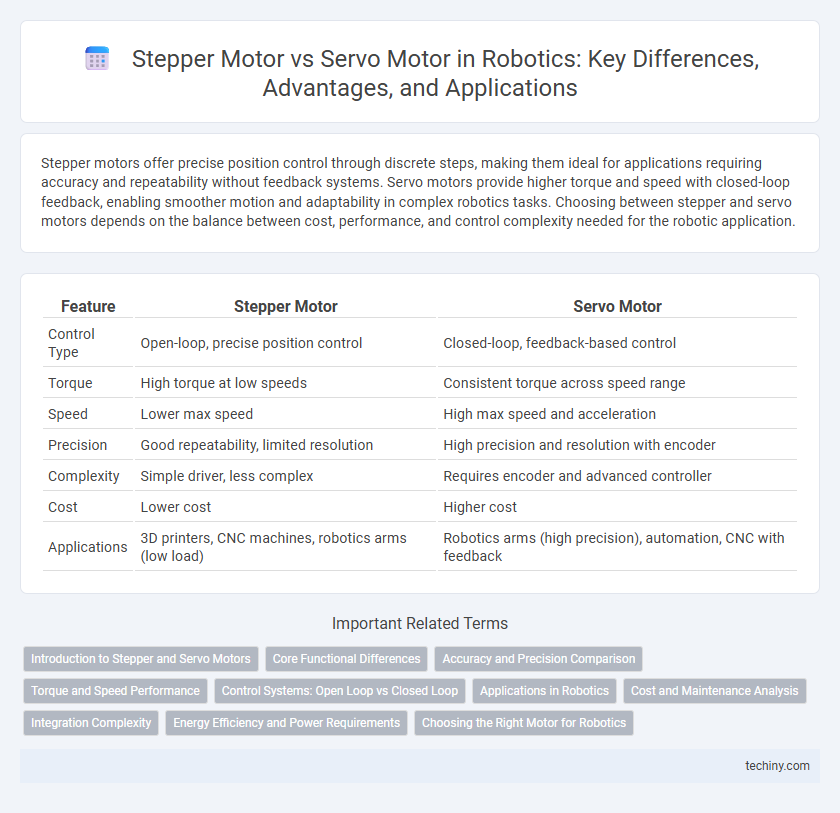
Stepper motors offer precise position control through discrete steps, making them ideal for applications requiring accuracy and repeatability without feedback systems. Servo motors provide higher torque and speed with closed-loop feedback, enabling smoother motion and adaptability in complex robotics tasks. Choosing between stepper and servo motors depends on the balance between cost, performance, and control complexity needed for the robotic application.
Table of Comparison
| Feature | Stepper Motor | Servo Motor |
|---|---|---|
| Control Type | Open-loop, precise position control | Closed-loop, feedback-based control |
| Torque | High torque at low speeds | Consistent torque across speed range |
| Speed | Lower max speed | High max speed and acceleration |
| Precision | Good repeatability, limited resolution | High precision and resolution with encoder |
| Complexity | Simple driver, less complex | Requires encoder and advanced controller |
| Cost | Lower cost | Higher cost |
| Applications | 3D printers, CNC machines, robotics arms (low load) | Robotics arms (high precision), automation, CNC with feedback |
Introduction to Stepper and Servo Motors
Stepper motors provide precise position control through discrete steps without feedback, making them ideal for applications requiring open-loop control and repeatability. Servo motors utilize a closed-loop system with feedback mechanisms, delivering high torque, speed control, and accuracy suitable for dynamic and high-performance robotic movements. Both motor types are integral in robotics, with steppers favored for simplicity and cost-effectiveness, while servos excel in demanding, precise motion control tasks.
Core Functional Differences
Stepper motors offer precise position control through discrete steps, making them ideal for applications requiring repeatable movements without feedback systems. Servo motors provide continuous rotation with high torque and speed, utilizing feedback loops for accurate positioning and dynamic response. The core functional difference lies in stepper motors operating open-loop with incremental steps, while servo motors use closed-loop control for smooth, precise motion.
Accuracy and Precision Comparison
Stepper motors offer high precision due to their ability to divide a full rotation into equal steps, typically providing an accuracy of +-5% to +-10% of a step, making them ideal for applications requiring repeatable positioning without feedback systems. Servo motors deliver superior accuracy and precision through closed-loop control with feedback encoders, achieving positional accuracy up to +-0.01deg, which is crucial for complex robotic movements and dynamic load conditions. While stepper motors excel in simplicity and cost-effectiveness for precise incremental control, servo motors outperform in precise angular positioning and consistent torque under variable speeds and loads.
Torque and Speed Performance
Stepper motors provide precise position control with moderate torque at low to medium speeds, making them ideal for applications requiring accuracy without high dynamic load demands. Servo motors deliver higher torque across a wide speed range and maintain consistent performance under variable loads, enabling smoother and faster motion in robotics. Torque performance in servo motors outpaces stepper motors significantly, particularly at high speeds, due to their closed-loop feedback systems optimizing power output.
Control Systems: Open Loop vs Closed Loop
Stepper motors operate primarily in open loop control systems, delivering precise position control without feedback by dividing a full rotation into fixed steps. Servo motors utilize closed loop control systems with encoders or resolvers to continuously monitor position, velocity, and torque, enabling higher accuracy and dynamic response. Closed loop control in servo motors allows real-time error correction, making them ideal for complex robotics applications requiring smooth motion and flexibility.
Applications in Robotics
Stepper motors offer precise position control and are widely used in robotic arms, 3D printers, and CNC machines where repeatability and low-speed torque are critical. Servo motors provide higher torque, velocity, and closed-loop feedback, making them ideal for robotic joints, mobile robots, and applications requiring dynamic motion control and accurate positioning. The choice between stepper and servo motors depends on factors like load requirements, precision, speed, and overall system complexity in robotic applications.
Cost and Maintenance Analysis
Stepper motors generally offer a lower initial cost and simpler maintenance due to their straightforward design and lack of feedback systems. Servo motors, while more expensive upfront, provide higher precision and reliability but require regular maintenance of components such as encoders and brushes. Cost efficiency in robotics depends on application complexity, with stepper motors favored for budget-conscious projects and servo motors justified for tasks demanding accuracy and durability.
Integration Complexity
Stepper motors require simpler integration due to their open-loop control systems, making them suitable for basic robotics applications with less precise positioning needs. Servo motors demand more complex integration involving closed-loop feedback systems, sensors, and controllers to achieve high-precision and dynamic motion control. The increased complexity in servo motor integration enhances accuracy and responsiveness, essential for advanced robotic tasks.
Energy Efficiency and Power Requirements
Stepper motors generally consume more energy due to continuous current flow even when stationary, making them less energy-efficient for prolonged operations. Servo motors adjust power usage dynamically based on load demands, resulting in higher energy efficiency and lower overall power consumption. The choice between stepper and servo motors in robotics depends heavily on the application's power requirements and efficiency priorities.
Choosing the Right Motor for Robotics
Stepper motors offer precise position control and simplicity, making them ideal for applications requiring accurate, repeatable movements without feedback systems. Servo motors provide high torque, speed, and feedback capabilities, suited for dynamic robotic tasks demanding smooth, continuous motion and adaptability to variable loads. Choosing the right motor depends on the robotics application's requirements for precision, torque, speed, and control complexity.
Stepper motor vs Servo motor Infographic