Synchronous communication in robotics ensures real-time data exchange, enabling precise coordination between robotic components for tasks requiring immediate response. Asynchronous communication allows robots to process information independently without waiting for a response, improving system efficiency in complex or distributed environments. Choosing between synchronous and asynchronous methods depends on the specific application requirements, such as latency sensitivity and processing workload.
Table of Comparison
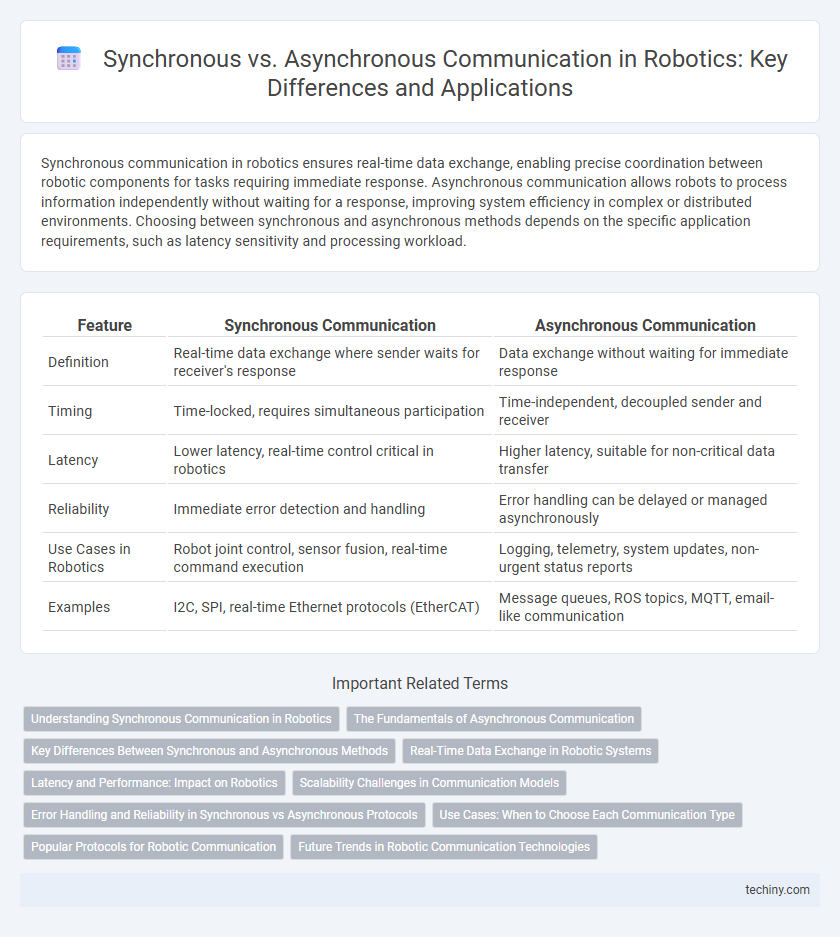
| Feature | Synchronous Communication | Asynchronous Communication |
|---|---|---|
| Definition | Real-time data exchange where sender waits for receiver's response | Data exchange without waiting for immediate response |
| Timing | Time-locked, requires simultaneous participation | Time-independent, decoupled sender and receiver |
| Latency | Lower latency, real-time control critical in robotics | Higher latency, suitable for non-critical data transfer |
| Reliability | Immediate error detection and handling | Error handling can be delayed or managed asynchronously |
| Use Cases in Robotics | Robot joint control, sensor fusion, real-time command execution | Logging, telemetry, system updates, non-urgent status reports |
| Examples | I2C, SPI, real-time Ethernet protocols (EtherCAT) | Message queues, ROS topics, MQTT, email-like communication |
Understanding Synchronous Communication in Robotics
Synchronous communication in robotics involves real-time data exchange where the sender and receiver are synchronized, ensuring immediate processing and response within the robotic system. This method is critical for tasks requiring precise timing and coordination, such as robotic arm movement or sensor-actuator interaction, where delays could disrupt performance. By maintaining a strict communication schedule, synchronous protocols like SPI and I2C support deterministic behavior essential for reliable robotic operations.
The Fundamentals of Asynchronous Communication
Asynchronous communication in robotics allows devices to exchange data without requiring simultaneous timing, making it ideal for systems with varying processing speeds. It uses start and stop bits to frame data packets, enabling error detection and flexible timing between transmitted bits. This communication method enhances robustness in complex robotic networks by accommodating latency and reducing synchronization overhead.
Key Differences Between Synchronous and Asynchronous Methods
Synchronous communication in robotics requires all devices to operate in a coordinated manner, exchanging data in real-time with precise timing, ensuring immediate response and synchronization. Asynchronous communication allows devices to transmit data independently without waiting for others, increasing flexibility and tolerance for variable latency but potentially causing timing mismatches. Key differences include timing dependency, with synchronous methods relying on a shared clock, and asynchronous methods using handshaking protocols or timestamps to manage data flow and coordination.
Real-Time Data Exchange in Robotic Systems
Synchronous communication in robotic systems ensures real-time data exchange by coordinating data transmission with clock signals, minimizing latency and guaranteeing timely responses crucial for precise robotic control. Asynchronous communication, while more flexible with variable data rates, can introduce delays due to handshaking and buffering, potentially impacting the responsiveness of time-critical robotic tasks. Optimal robotic system design often balances synchronous methods for deterministic timing with asynchronous protocols to handle less time-sensitive data streams efficiently.
Latency and Performance: Impact on Robotics
Synchronous communication in robotics entails fixed latency with predictable timing, enhancing real-time control accuracy essential for tasks requiring precise coordination. Asynchronous communication, while introducing variable latency, allows for greater flexibility and scalability in robotic systems, accommodating diverse sensor inputs and distributed processing. Latency variability in asynchronous methods can impact performance, but optimized protocols and buffering strategies mitigate delays, ensuring robust responsiveness in complex robotic applications.
Scalability Challenges in Communication Models
Synchronous communication in robotics demands real-time coordination, limiting scalability due to strict timing constraints and potential bottlenecks as the number of nodes increases. Asynchronous communication offers greater scalability by allowing robots to operate independently without waiting for immediate responses, reducing latency and improving fault tolerance in large-scale networks. However, asynchronous models introduce complexity in ensuring data consistency and synchronization across distributed robotic systems.
Error Handling and Reliability in Synchronous vs Asynchronous Protocols
Synchronous communication in robotics ensures error handling through constant timing alignment, resulting in predictable data transfer and higher reliability under controlled network conditions. Asynchronous communication offers flexibility by allowing devices to transmit data independently, but error detection and correction mechanisms must compensate for timing variations, potentially reducing reliability in noisy environments. Robust error handling protocols like CRC and acknowledgments are critical in asynchronous systems to maintain data integrity despite the lack of synchronized clocks.
Use Cases: When to Choose Each Communication Type
Synchronous communication in robotics suits real-time control systems requiring immediate feedback, such as robotic surgery and collaborative manufacturing robots, due to its low latency and precise coordination. Asynchronous communication excels in scenarios like sensor data processing and remote monitoring where timing is flexible and message loss can be tolerated, enabling scalable and fault-tolerant robot networks. Engineers select synchronous methods for tasks needing deterministic timing and asynchronous methods when handling distributed systems with intermittent connectivity.
Popular Protocols for Robotic Communication
Synchronous communication protocols such as SPI and I2C are widely used in robotics for real-time data exchange due to their predictable timing and clock-based synchronization, enabling precise control of sensors and actuators. Asynchronous communication protocols like UART and CAN bus offer flexibility and robustness for long-distance or multi-node robotic networks by eliminating the need for a shared clock signal. Popular robotic communication standards leverage these protocols to balance latency, reliability, and scalability in complex autonomous systems.
Future Trends in Robotic Communication Technologies
Future trends in robotic communication technologies emphasize the integration of hybrid synchronous and asynchronous communication protocols to enhance real-time responsiveness and data throughput, particularly in multi-robot systems and autonomous vehicle networks. Advances in 5G and edge computing enable low-latency synchronous transmissions, while asynchronous communication supports scalable, event-driven interactions essential for distributed robotics and Internet of Things (IoT) ecosystems. Emerging AI-driven communication frameworks optimize resource allocation, improving reliability and efficiency across robot-to-robot and robot-to-infrastructure channels.
Synchronous communication vs Asynchronous communication Infographic