Visual servoing leverages real-time image data to guide robotic motion, enabling precise adjustments based on visual feedback. Force control relies on tactile sensors to regulate interaction forces, ensuring safe manipulation and adaptability to varying contact conditions. Combining visual servoing with force control enhances the robot's ability to perform complex tasks with both positional accuracy and dynamic responsiveness.
Table of Comparison
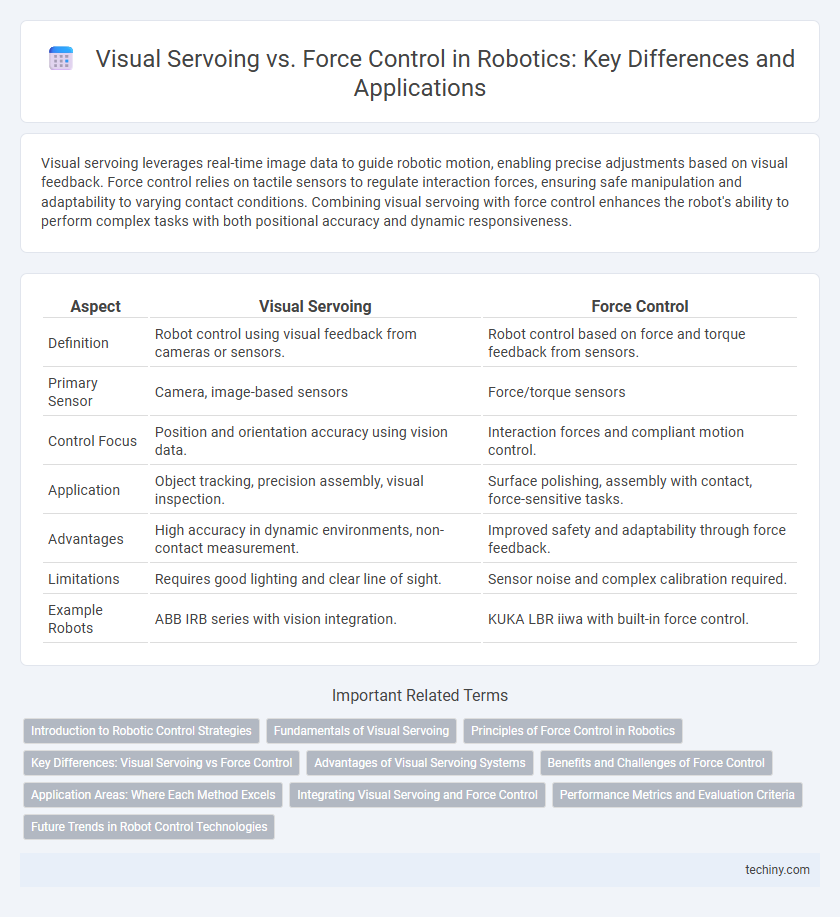
| Aspect | Visual Servoing | Force Control |
|---|---|---|
| Definition | Robot control using visual feedback from cameras or sensors. | Robot control based on force and torque feedback from sensors. |
| Primary Sensor | Camera, image-based sensors | Force/torque sensors |
| Control Focus | Position and orientation accuracy using vision data. | Interaction forces and compliant motion control. |
| Application | Object tracking, precision assembly, visual inspection. | Surface polishing, assembly with contact, force-sensitive tasks. |
| Advantages | High accuracy in dynamic environments, non-contact measurement. | Improved safety and adaptability through force feedback. |
| Limitations | Requires good lighting and clear line of sight. | Sensor noise and complex calibration required. |
| Example Robots | ABB IRB series with vision integration. | KUKA LBR iiwa with built-in force control. |
Introduction to Robotic Control Strategies
Visual servoing leverages real-time image feedback to guide robotic motion, enhancing precision in dynamic environments by continuously adjusting based on visual data. Force control relies on tactile sensors to regulate interaction forces between the robot and its environment, ensuring safe and compliant manipulation tasks. Combining visual servoing with force control enables robust and adaptive robotic systems capable of complex operations requiring both accurate positioning and delicate force management.
Fundamentals of Visual Servoing
Visual servoing relies on real-time image feedback to control robotic motion, using visual data to adjust the robot's position and orientation dynamically. It fundamentally involves processing camera images to extract feature points or objects for precise alignment and trajectory control, enhancing accuracy in complex environments. This approach contrasts with force control, which depends on tactile sensing to regulate interaction forces rather than visual cues.
Principles of Force Control in Robotics
Force control in robotics enables precise interaction with environments by regulating the force exerted by a robot's end effector, using sensors to monitor contact forces and adjust actuator commands accordingly. Unlike visual servoing, which relies on image feedback to guide position and motion, force control focuses on tactile feedback to maintain desired force profiles during manipulation. This principle allows robots to perform delicate tasks such as assembly, grinding, or human-robot interaction, where controlled force application is critical to success.
Key Differences: Visual Servoing vs Force Control
Visual servoing relies on real-time image feedback to guide robotic movements, optimizing precision by continuously adjusting motion based on visual data. Force control uses tactile sensor inputs to regulate the interaction forces between the robot and its environment, ensuring safe and compliant contact during tasks. The key difference lies in sensory modality: visual servoing prioritizes spatial accuracy through camera-based feedback, while force control emphasizes dynamic interaction through force measurements.
Advantages of Visual Servoing Systems
Visual servoing systems offer enhanced precision by utilizing real-time image feedback to adapt robot movements instantly, improving accuracy in dynamic environments. These systems enable non-contact interaction, reducing wear on mechanical components and minimizing risk of damage during delicate tasks. Integration with machine vision enhances obstacle detection and path correction, resulting in superior adaptability compared to force control methods.
Benefits and Challenges of Force Control
Force control enhances robotic manipulation by enabling precise interaction with environments through real-time measurement and adjustment of applied forces, improving task adaptability and safety in unstructured settings. Challenges include sensor integration complexity, signal noise sensitivity, and the need for advanced control algorithms to maintain stability and responsiveness during dynamic tasks. Unlike visual servoing, force control excels in scenarios requiring direct physical interaction, such as delicate assembly or handling deformable objects, but demands robust calibration and tuning for reliable performance.
Application Areas: Where Each Method Excels
Visual servoing excels in applications requiring precise position control based on real-time image feedback, such as robotic assembly, object tracking, and surgical robotics. Force control is ideal for tasks involving physical interaction with the environment, including delicate manipulation, compliant surface contact, and assembly with uncertain forces. Industries like manufacturing, healthcare, and automation leverage visual servoing for accuracy and force control for safe handling and adaptability in complex contact tasks.
Integrating Visual Servoing and Force Control
Integrating visual servoing and force control enhances robotic manipulation by combining precise pose regulation with adaptive force feedback, enabling improved task execution in unstructured environments. Hybrid control schemes leverage camera-based real-time position data alongside tactile sensors to maintain desired contact forces while adjusting end-effector trajectories. This fusion supports applications requiring delicate interaction, such as assembly, surface finishing, and object handling, by dynamically balancing visual and force inputs for optimized performance.
Performance Metrics and Evaluation Criteria
Performance metrics for visual servoing emphasize accuracy, response time, and robustness to visual noise, with evaluation criteria including tracking error, convergence speed, and stability under varying lighting conditions. In contrast, force control performance is assessed based on force regulation precision, compliance, and disturbance rejection, with evaluation focusing on force tracking error, dynamic response, and interaction safety. Metrics such as positional accuracy and force stability are critical in determining the suitability of each control method for tasks requiring real-time adaptation to environmental changes.
Future Trends in Robot Control Technologies
Future trends in robot control technologies emphasize the integration of visual servoing and force control to enhance precision and adaptability in dynamic environments. Advances in machine learning algorithms and sensor fusion techniques enable robots to interpret complex visual data and tactile feedback simultaneously, improving real-time decision-making. Emerging control frameworks leverage these multimodal inputs to optimize robot performance in tasks requiring delicate manipulation and robust interaction with unpredictable surroundings.
Visual servoing vs force control Infographic