Plane detection in augmented reality identifies flat surfaces such as floors and tables, enabling stable object placement and interaction within the environment. Point cloud recognition captures a dense set of spatial data points, providing a detailed three-dimensional map that supports complex object recognition and scene understanding. Prioritizing plane detection improves usability for straightforward applications, while point cloud recognition enhances accuracy for advanced, spatially aware experiences.
Table of Comparison
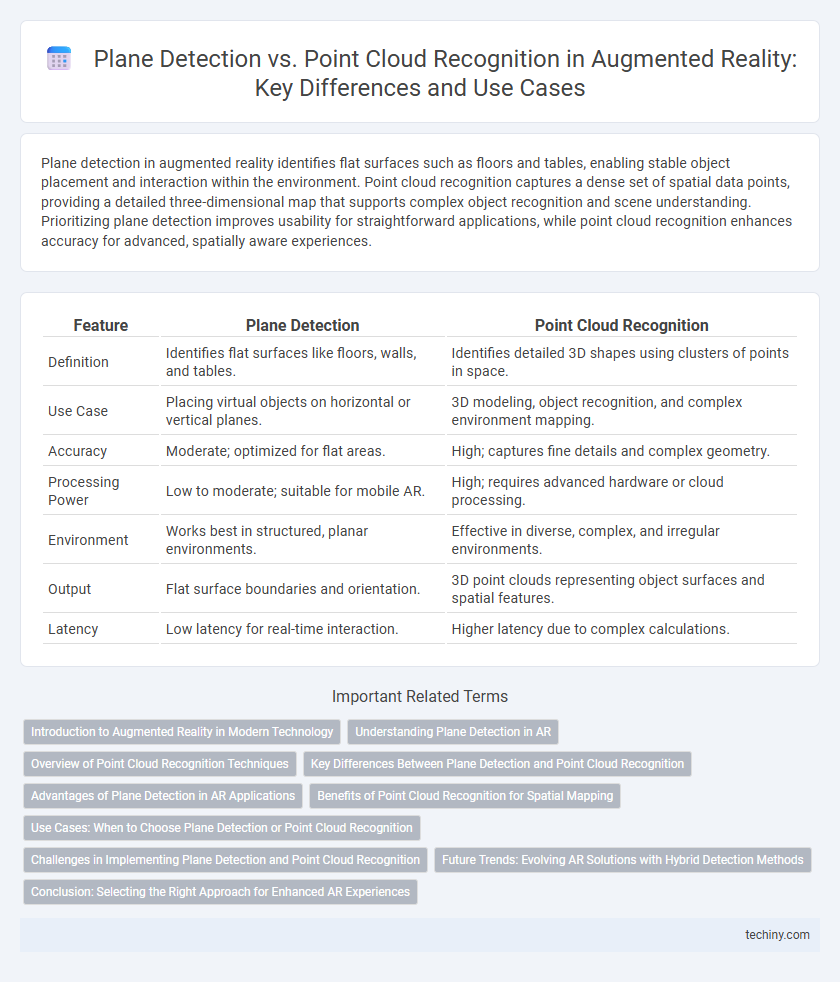
| Feature | Plane Detection | Point Cloud Recognition |
|---|---|---|
| Definition | Identifies flat surfaces like floors, walls, and tables. | Identifies detailed 3D shapes using clusters of points in space. |
| Use Case | Placing virtual objects on horizontal or vertical planes. | 3D modeling, object recognition, and complex environment mapping. |
| Accuracy | Moderate; optimized for flat areas. | High; captures fine details and complex geometry. |
| Processing Power | Low to moderate; suitable for mobile AR. | High; requires advanced hardware or cloud processing. |
| Environment | Works best in structured, planar environments. | Effective in diverse, complex, and irregular environments. |
| Output | Flat surface boundaries and orientation. | 3D point clouds representing object surfaces and spatial features. |
| Latency | Low latency for real-time interaction. | Higher latency due to complex calculations. |
Introduction to Augmented Reality in Modern Technology
Plane detection in augmented reality (AR) identifies flat surfaces such as floors, walls, and tables to anchor virtual objects realistically in a physical environment. Point cloud recognition captures detailed 3D spatial data by mapping numerous points in space, enabling complex scene reconstruction and object interaction within AR applications. Both technologies enhance AR experiences by improving spatial understanding and accurate placement of digital content in modern AR systems.
Understanding Plane Detection in AR
Plane detection in augmented reality (AR) enables devices to identify flat surfaces such as floors, walls, and tables by analyzing spatial data from sensors and cameras. Unlike point cloud recognition, which maps numerous individual 3D points to represent complex environments, plane detection simplifies interaction by providing geometrically defined surfaces crucial for placing virtual objects realistically. This process enhances user experience in AR applications by ensuring stable and accurate anchoring of digital content to real-world environments.
Overview of Point Cloud Recognition Techniques
Point cloud recognition techniques leverage 3D spatial data captured by sensors to identify and interpret objects or environments in augmented reality applications. These methods analyze a dense set of individual points defined by their spatial coordinates, enabling precise model reconstruction and feature extraction beyond simple plane detection. Advanced algorithms like RANSAC, ICP, and deep learning-based segmentation enhance the accuracy and reliability of object recognition within complex point clouds.
Key Differences Between Plane Detection and Point Cloud Recognition
Plane detection identifies flat surfaces in augmented reality environments by analyzing geometric shapes, enabling the placement of virtual objects on walls, floors, or tables. Point cloud recognition processes a collection of data points in 3D space to reconstruct detailed environmental features, providing a comprehensive spatial understanding. The key difference lies in plane detection's focus on large, simple surfaces compared to point cloud recognition's ability to capture complex and irregular geometries for more precise spatial mapping.
Advantages of Plane Detection in AR Applications
Plane detection in augmented reality offers precise identification of flat surfaces like floors, walls, and tables, enhancing object placement stability. It requires lower computational power compared to point cloud recognition, resulting in faster processing and smoother user experiences. Plane detection enables reliable spatial mapping, improving interaction accuracy and immersion in AR applications.
Benefits of Point Cloud Recognition for Spatial Mapping
Point cloud recognition enables highly detailed and accurate 3D spatial mapping by capturing millions of data points from the environment, allowing for precise object identification and surface reconstruction. This method enhances spatial understanding in augmented reality applications by generating rich, textured models that improve interaction and navigation. Unlike plane detection, point cloud recognition offers superior granularity and scalability, supporting complex environments with irregular geometries and dynamic changes.
Use Cases: When to Choose Plane Detection or Point Cloud Recognition
Plane detection excels in applications requiring identification of flat surfaces such as floors, walls, or tables, making it ideal for furniture placement, room measurement, and navigation in indoor environments. Point cloud recognition is more suitable for complex 3D mapping and object recognition where detailed spatial data is necessary, such as in industrial inspection, heritage preservation, and robotics. Choosing between plane detection and point cloud recognition depends on the need for either simplified surface approximation or comprehensive 3D spatial understanding.
Challenges in Implementing Plane Detection and Point Cloud Recognition
Implementing plane detection in augmented reality faces challenges such as accurately identifying horizontal and vertical surfaces in cluttered or feature-poor environments, which can lead to false positives or missed detections. Point cloud recognition struggles with processing large datasets in real-time, requiring substantial computational power and efficient algorithms to differentiate meaningful features from noise. Both methods demand high-precision sensors and robust software to maintain spatial mapping accuracy under dynamic lighting and environmental conditions.
Future Trends: Evolving AR Solutions with Hybrid Detection Methods
Future trends in augmented reality emphasize the integration of plane detection and point cloud recognition to create hybrid detection methods, enhancing spatial understanding and interaction accuracy. Combining these techniques enables AR systems to leverage the efficiency of plane detection with the detailed environmental mapping provided by point cloud data. This fusion drives the development of more robust, adaptive AR solutions across industries such as gaming, architecture, and industrial maintenance.
Conclusion: Selecting the Right Approach for Enhanced AR Experiences
Plane detection excels in recognizing flat surfaces such as floors and walls, providing stable anchors for AR content placement, while point cloud recognition captures complex, irregular geometries, enabling more detailed and dynamic environmental mapping. Choosing the optimal method depends on the AR application's specific requirements: plane detection suits scenarios needing precise, stable placement, whereas point cloud recognition enhances interactions within richly textured or cluttered spaces. Integrating both techniques can deliver the most immersive AR experiences by balancing accuracy and environmental complexity.
Plane detection vs Point cloud recognition Infographic