Spatial mapping creates a comprehensive 3D model of the environment by capturing surfaces and volumes, enabling accurate object placement and interaction in augmented reality. Point cloud mapping collects a dense array of data points representing the physical space but lacks the continuous surface information necessary for detailed scene understanding. Choosing between spatial mapping and point cloud mapping depends on whether detailed environmental context or raw spatial data is prioritized for the AR application.
Table of Comparison
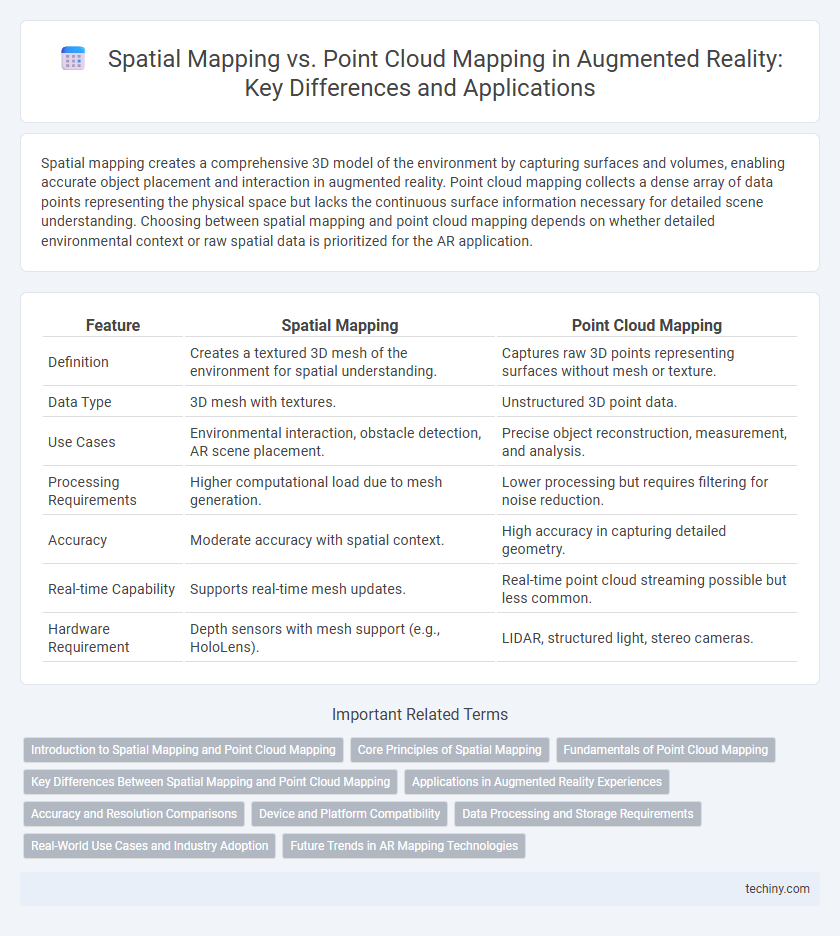
| Feature | Spatial Mapping | Point Cloud Mapping |
|---|---|---|
| Definition | Creates a textured 3D mesh of the environment for spatial understanding. | Captures raw 3D points representing surfaces without mesh or texture. |
| Data Type | 3D mesh with textures. | Unstructured 3D point data. |
| Use Cases | Environmental interaction, obstacle detection, AR scene placement. | Precise object reconstruction, measurement, and analysis. |
| Processing Requirements | Higher computational load due to mesh generation. | Lower processing but requires filtering for noise reduction. |
| Accuracy | Moderate accuracy with spatial context. | High accuracy in capturing detailed geometry. |
| Real-time Capability | Supports real-time mesh updates. | Real-time point cloud streaming possible but less common. |
| Hardware Requirement | Depth sensors with mesh support (e.g., HoloLens). | LIDAR, structured light, stereo cameras. |
Introduction to Spatial Mapping and Point Cloud Mapping
Spatial mapping captures and reconstructs real-world environments into 3D models by detecting surfaces and objects, enabling augmented reality (AR) applications to interact contextually with physical spaces. Point cloud mapping generates detailed representations using millions of spatial points collected by sensors like LiDAR, providing precise depth and shape information for AR experiences. Both techniques are fundamental in AR for creating immersive and interactive digital overlays aligned accurately with the physical world.
Core Principles of Spatial Mapping
Spatial mapping constructs a detailed 3D model of the environment by capturing surfaces and volume, enabling real-time interaction and occlusion in augmented reality applications. It relies on depth sensors and SLAM algorithms to create continuous meshes representing walls, floors, and objects, which support accurate spatial understanding and anchoring of virtual content. Unlike point cloud mapping that records discrete points in space, spatial mapping emphasizes the formation of coherent surfaces for immersive user experiences.
Fundamentals of Point Cloud Mapping
Point Cloud Mapping captures detailed 3D spatial data by collecting millions of discrete points that represent the environment's geometry, enabling precise surface reconstruction and object recognition. This method relies on sensors such as LiDAR or depth cameras to generate accurate spatial coordinates, facilitating real-time mapping in augmented reality applications. Unlike Spatial Mapping, which creates meshes to represent surfaces, Point Cloud Mapping preserves raw data points, offering higher accuracy and flexibility for complex environment analysis.
Key Differences Between Spatial Mapping and Point Cloud Mapping
Spatial mapping creates a detailed 3D mesh of an environment by capturing surfaces and shapes, enabling real-time interaction with virtual objects. Point cloud mapping collects discrete points in space to represent object geometry, providing raw spatial data without continuous surface information. The key difference lies in spatial mapping's focus on creating surface-aware models for AR applications, while point cloud mapping emphasizes precise coordinate data for analysis and reconstruction.
Applications in Augmented Reality Experiences
Spatial mapping captures environmental surfaces and structures to create a comprehensive 3D mesh, enabling augmented reality (AR) applications like interior design, navigation, and obstacle detection to interact seamlessly with real-world geometry. Point cloud mapping records discrete points in space, providing high-precision data ideal for AR scenarios requiring detailed object recognition, 3D scanning, and environment reconstruction. Both techniques enhance AR experiences by offering varied levels of spatial understanding, with spatial mapping excelling in immersive interactions and point cloud mapping delivering fine-grained spatial data.
Accuracy and Resolution Comparisons
Spatial mapping captures detailed environmental meshes with high-resolution surfaces, enabling precise object placement and interaction in augmented reality. Point cloud mapping collects discrete spatial data points, offering lower resolution but faster processing, often sacrificing accuracy in complex scenes. Accurate AR experiences demand spatial mapping for fine detail, while point cloud mapping suits applications prioritizing speed over precision.
Device and Platform Compatibility
Spatial mapping leverages device sensors such as LiDAR and depth cameras to create detailed 3D meshes compatible with AR platforms like ARKit and ARCore, offering high accuracy in indoor environment reconstruction. Point cloud mapping collects discrete spatial data points using sensor arrays, delivering versatile, raw depth information compatible across diverse AR devices but often requiring extensive processing for real-time applications. Device and platform compatibility depend on sensor availability and processing power, with spatial mapping favored on platforms supporting high-fidelity scene understanding, while point cloud mapping remains adaptable for devices with basic depth sensing capabilities.
Data Processing and Storage Requirements
Spatial mapping generates detailed 3D mesh representations by processing surface geometry, requiring substantial computational power and larger storage capacities to handle continuous data updates. Point cloud mapping captures discrete data points representing object surfaces, resulting in lighter data loads and more efficient storage but often necessitates advanced algorithms for accurate spatial interpretation. Optimizing data processing workflows and storage solutions is critical for real-time augmented reality applications leveraging either mapping technique.
Real-World Use Cases and Industry Adoption
Spatial mapping captures detailed environmental surfaces to create accurate 3D meshes for applications in indoor navigation, architecture, and maintenance, facilitating precise object placement and obstacle detection in augmented reality. Point cloud mapping collects vast sets of spatial data points to reconstruct environments in industries like construction, forestry, and robotics, enabling real-time analysis and volumetric measurements. Both technologies drive industry adoption by enhancing situational awareness and operational efficiency through immersive, context-aware AR solutions.
Future Trends in AR Mapping Technologies
Future trends in AR mapping technologies emphasize the integration of spatial mapping and point cloud mapping to enhance environmental understanding and object recognition. Advances in machine learning algorithms and sensor fusion are driving more accurate and real-time 3D reconstructions, enabling immersive and interactive AR experiences. Increased adoption of LiDAR sensors and edge computing will further improve the precision and efficiency of AR mapping, transforming applications across industries such as healthcare, manufacturing, and urban planning.
Spatial Mapping vs Point Cloud Mapping Infographic