SLAM (Simultaneous Localization and Mapping) creates detailed maps and tracks device location simultaneously, excelling in complex environments where precise spatial understanding is critical. VIO (Visual-Inertial Odometry) combines visual data with inertial sensor input to deliver rapid and robust motion tracking, ideal for lightweight augmented reality applications with lower computational overhead. Choosing between SLAM and VIO depends on the required accuracy, processing power, and environmental complexity of the AR experience.
Table of Comparison
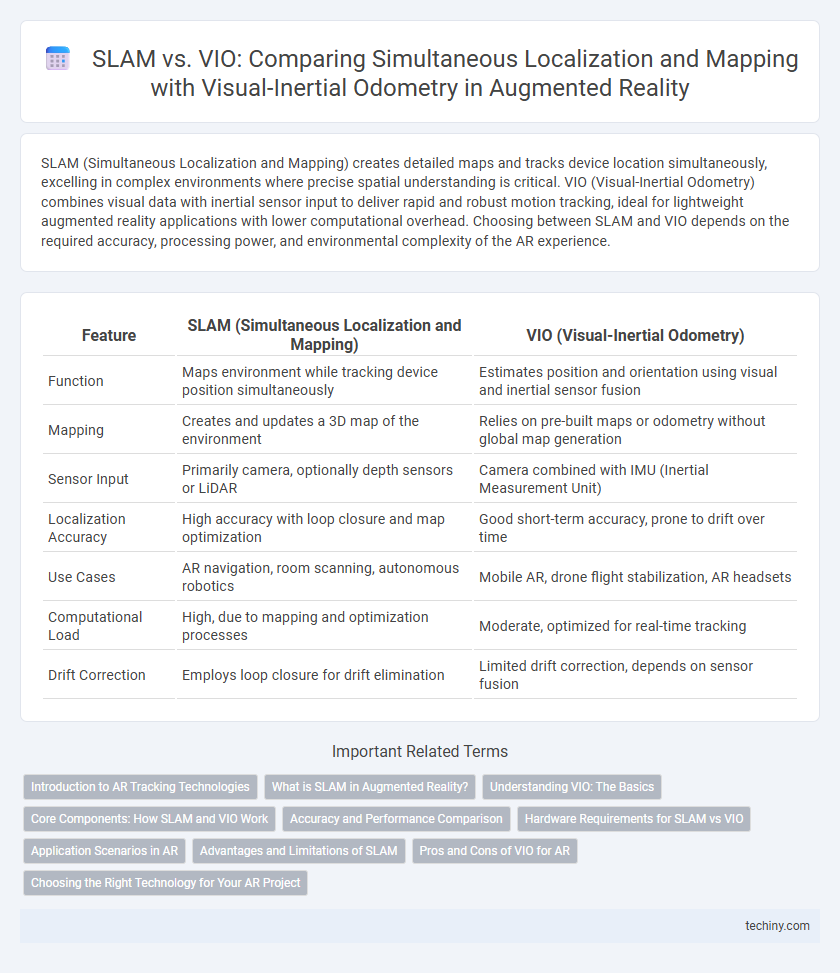
| Feature | SLAM (Simultaneous Localization and Mapping) | VIO (Visual-Inertial Odometry) |
|---|---|---|
| Function | Maps environment while tracking device position simultaneously | Estimates position and orientation using visual and inertial sensor fusion |
| Mapping | Creates and updates a 3D map of the environment | Relies on pre-built maps or odometry without global map generation |
| Sensor Input | Primarily camera, optionally depth sensors or LiDAR | Camera combined with IMU (Inertial Measurement Unit) |
| Localization Accuracy | High accuracy with loop closure and map optimization | Good short-term accuracy, prone to drift over time |
| Use Cases | AR navigation, room scanning, autonomous robotics | Mobile AR, drone flight stabilization, AR headsets |
| Computational Load | High, due to mapping and optimization processes | Moderate, optimized for real-time tracking |
| Drift Correction | Employs loop closure for drift elimination | Limited drift correction, depends on sensor fusion |
Introduction to AR Tracking Technologies
SLAM (Simultaneous Localization and Mapping) creates real-time maps while tracking device location using visual data, enabling robust AR experiences in unknown environments. VIO (Visual-Inertial Odometry) combines camera imagery with inertial measurements from IMUs for precise, low-latency motion tracking, ideal for smooth AR navigation. Both technologies serve as foundational AR tracking methods, balancing accuracy and computational efficiency for immersive augmented reality applications.
What is SLAM in Augmented Reality?
SLAM (Simultaneous Localization and Mapping) in Augmented Reality enables devices to create and update a map of an unknown environment while simultaneously keeping track of their precise location within it. This technology integrates sensor data such as cameras and depth sensors to build a dynamic 3D model, enhancing AR experiences by accurately anchoring virtual objects in real-world spaces. SLAM's capability to perform real-time spatial mapping is critical for immersive AR applications in gaming, navigation, and industrial maintenance.
Understanding VIO: The Basics
Visual-Inertial Odometry (VIO) integrates data from a camera and inertial measurement unit (IMU) to estimate a device's position and orientation in real time. Unlike SLAM, which builds a detailed map of the environment while localizing, VIO primarily focuses on continuous motion tracking without relying heavily on mapping. This combination of visual and inertial data enables robust, low-latency pose estimation essential for augmented reality applications in dynamic or feature-sparse environments.
Core Components: How SLAM and VIO Work
SLAM (Simultaneous Localization and Mapping) combines sensor data from cameras, LiDAR, and sometimes IMUs to build a real-time 3D map of the environment while simultaneously tracking the device's position within it. VIO (Visual-Inertial Odometry) fuses visual information from cameras with inertial data from IMUs to estimate motion and orientation, focusing primarily on accurate device trajectory without creating a full environmental map. The core components of SLAM involve feature extraction, data association, state estimation, and map updating, whereas VIO relies heavily on tightly-coupled sensor fusion algorithms that integrate visual and inertial measurements for fast, robust pose estimation.
Accuracy and Performance Comparison
SLAM (Simultaneous Localization and Mapping) offers high accuracy in mapping and environment understanding by continuously updating the map while localizing the device, ideal for complex and large-scale AR applications. VIO (Visual-Inertial Odometry) combines camera data with IMU sensors to enhance real-time tracking performance, providing faster pose estimation but with slightly less mapping precision compared to SLAM. Performance-wise, SLAM demands higher computational resources, whereas VIO delivers smoother user experiences on mobile devices due to its lower latency and reduced processing overhead.
Hardware Requirements for SLAM vs VIO
SLAM typically demands more computational power and specialized sensors such as LiDAR or depth cameras to generate precise 3D maps and ensure accurate localization. VIO relies primarily on standard RGB cameras combined with inertial measurement units (IMUs), offering a more hardware-efficient solution that reduces cost and power consumption. The integration of IMUs in VIO enhances real-time tracking reliability while maintaining lower hardware complexity compared to SLAM systems.
Application Scenarios in AR
SLAM (Simultaneous Localization and Mapping) excels in large-scale AR applications requiring accurate environmental mapping and real-time localization, such as indoor navigation and complex object placement. VIO (Visual-Inertial Odometry) is optimal for mobile AR experiences with limited computational resources, leveraging camera and inertial sensors to provide fast, robust tracking in dynamic environments like outdoor gaming or fitness apps. Both technologies enhance spatial awareness but differ in scalability and sensor fusion, influencing their suitability across diverse AR scenarios.
Advantages and Limitations of SLAM
SLAM (Simultaneous Localization and Mapping) excels in creating detailed environmental maps while tracking device position simultaneously, enabling robust navigation without reliance on external references. Its main advantages include high accuracy in large-scale or complex environments and adaptability to dynamic changes, but limitations arise from computational intensity, susceptibility to lighting conditions, and potential map errors in feature-poor areas. SLAM systems often require more processing power and may struggle with real-time performance compared to VIO, which integrates inertial data for faster but less comprehensive localization.
Pros and Cons of VIO for AR
Visual-Inertial Odometry (VIO) combines camera data with inertial measurements to provide robust pose estimation critical for Augmented Reality, excelling in environments with rapid motion or limited visual features where SLAM may struggle. VIO's lightweight computational requirements enable real-time tracking on mobile and wearable AR devices, offering reduced latency and improved power efficiency compared to full SLAM systems. However, VIO tends to accumulate drift over time without global map correction, which can degrade spatial consistency in long-duration AR experiences.
Choosing the Right Technology for Your AR Project
Choosing between SLAM (Simultaneous Localization and Mapping) and VIO (Visual-Inertial Odometry) depends on the specific needs of your AR project. SLAM excels in creating detailed maps of unknown environments while accurately tracking device location, making it ideal for large-scale applications requiring persistent spatial understanding. VIO combines camera data with inertial sensors for fast, reliable motion tracking in environments where mapping is less critical, offering lower latency and power consumption suitable for mobile or wearable AR devices.
SLAM (Simultaneous Localization and Mapping) vs VIO (Visual-Inertial Odometry) Infographic