Servo motors provide precise control with high torque and speed, making them ideal for dynamic robotic movements requiring accuracy. Stepper motors deliver excellent position control with simpler wiring and cost-effectiveness, suitable for applications with slower speeds and repetitive tasks. Selecting between servo and stepper depends on the robotic system's performance needs and budget constraints.
Table of Comparison
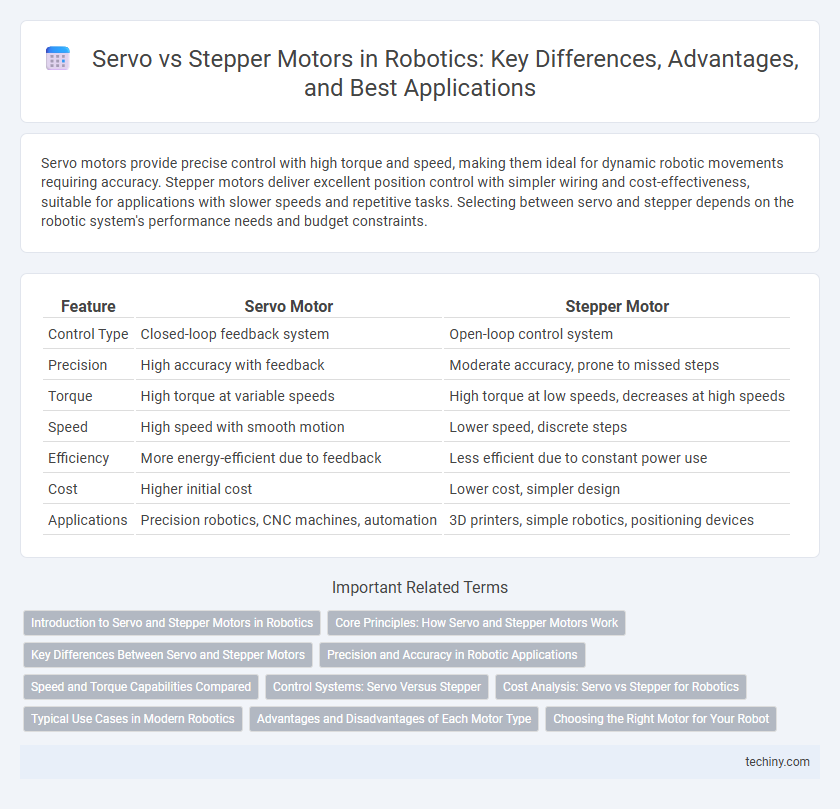
| Feature | Servo Motor | Stepper Motor |
|---|---|---|
| Control Type | Closed-loop feedback system | Open-loop control system |
| Precision | High accuracy with feedback | Moderate accuracy, prone to missed steps |
| Torque | High torque at variable speeds | High torque at low speeds, decreases at high speeds |
| Speed | High speed with smooth motion | Lower speed, discrete steps |
| Efficiency | More energy-efficient due to feedback | Less efficient due to constant power use |
| Cost | Higher initial cost | Lower cost, simpler design |
| Applications | Precision robotics, CNC machines, automation | 3D printers, simple robotics, positioning devices |
Introduction to Servo and Stepper Motors in Robotics
Servo motors provide precise control of angular or linear position, velocity, and acceleration using feedback systems, making them ideal for robotic arms and precision tasks. Stepper motors move in discrete steps without feedback, offering straightforward control and high torque at low speeds, suitable for applications requiring simple positioning. Both motor types play crucial roles in robotics, with servo motors excelling in accuracy and stepper motors favored for cost-effective, open-loop control.
Core Principles: How Servo and Stepper Motors Work
Servo motors use closed-loop control systems that continuously monitor position, velocity, and torque through feedback sensors, enabling precise and smooth motion adjustments. Stepper motors operate on an open-loop principle, moving in fixed increments or steps by energizing coils in a specific sequence, which simplifies control but may lead to missed steps under high load. Servo systems provide high torque and accuracy with dynamic response, while stepper motors excel in applications requiring straightforward, cost-effective repositioning without feedback mechanisms.
Key Differences Between Servo and Stepper Motors
Servo motors provide precise position control with high torque and speed through feedback systems, enabling smooth and accurate motion, while stepper motors move in discrete steps without feedback, offering simpler control but lower torque and speed. Servo motors excel in applications requiring high efficiency and dynamic response, whereas stepper motors are favored for cost-effective, open-loop tasks with moderate precision. The choice depends on the application's demand for accuracy, load capacity, and complexity of control systems.
Precision and Accuracy in Robotic Applications
Servo motors provide higher precision and accuracy in robotic applications due to their closed-loop control system that continuously monitors and adjusts position feedback. Stepper motors operate with open-loop control, offering good repeatability but less precise positioning, making them suitable for applications where exact accuracy is not critical. Servo systems enable smoother motion and maintain consistent torque under varying loads, enhancing performance in high-precision robotic tasks.
Speed and Torque Capabilities Compared
Servo motors provide higher speed and torque capabilities compared to stepper motors, making them ideal for dynamic robotic applications requiring precision and rapid movement. Stepper motors, with their inherent torque at low speeds but decreased efficiency at higher speeds, suit tasks demanding consistent positioning without complex feedback systems. Servo systems integrate encoders and closed-loop control, enabling superior torque delivery and acceleration rates across a broader speed range than open-loop stepper configurations.
Control Systems: Servo Versus Stepper
Servo motors offer precise closed-loop control with feedback systems that adjust position, speed, and torque in real-time, making them ideal for complex robotic applications requiring high accuracy. Stepper motors operate on an open-loop control principle, moving in discrete steps without feedback, suitable for simpler tasks where cost-effectiveness and ease of control are prioritized. The choice between servo and stepper control systems depends on the desired precision, response time, and complexity of the robotic operation.
Cost Analysis: Servo vs Stepper for Robotics
Servo motors generally have a higher upfront cost compared to stepper motors due to advanced feedback systems and precise control capabilities, making them more suitable for high-performance robotics applications. Stepper motors are typically more cost-effective for simpler or low-torque tasks but may incur additional expenses from missed steps or lack of closed-loop control. Evaluating total lifecycle costs, including maintenance, energy consumption, and system complexity, is critical in choosing between servo and stepper motors for robotic projects.
Typical Use Cases in Modern Robotics
Servo motors excel in applications requiring precise control of position, speed, and torque, making them ideal for robotic arms and autonomous vehicles where accuracy and dynamic response are critical. Stepper motors are preferred in tasks that demand simple, consistent, and repeatable motion, such as conveyor belts, 3D printers, and basic pick-and-place robots due to their reliability and ease of control. Integration of servo motors in industrial robots enhances high-performance operations, while stepper motors often support budget-friendly, low-speed robotic tasks.
Advantages and Disadvantages of Each Motor Type
Servo motors offer high precision, smooth motion, and excellent torque-to-weight ratio, making them ideal for dynamic and complex robotic movements. Stepper motors provide reliable, simple control with precise positioning at a lower cost but often suffer from resonance issues and lower efficiency at high speeds. Choosing between servo and stepper motors depends on application requirements such as torque, speed, accuracy, and budget constraints.
Choosing the Right Motor for Your Robot
Selecting the right motor for your robot depends on the specific requirements of precision, torque, and speed. Servo motors provide closed-loop control with high accuracy and dynamic response, making them ideal for applications needing precise positioning and variable speed. Stepper motors offer simple open-loop control and better torque at low speeds, suitable for cost-effective designs where exact positioning within incremental steps is critical.
servo vs stepper Infographic