An end effector is the robotic device attached to the arm's end that interacts directly with objects, enabling tasks such as gripping, welding, or painting. A tool changer, however, allows the robot to switch between multiple end effectors automatically, enhancing versatility and operational efficiency. Integrating a tool changer significantly expands a robot's functionality by enabling seamless transitions between different tools without manual intervention.
Table of Comparison
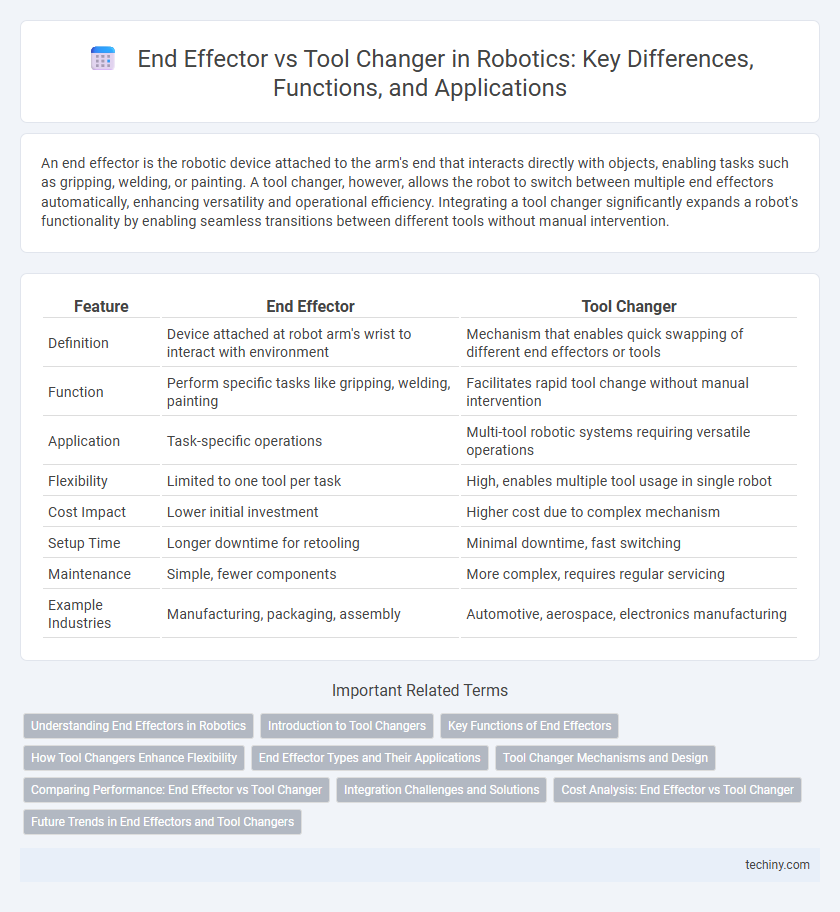
| Feature | End Effector | Tool Changer |
|---|---|---|
| Definition | Device attached at robot arm's wrist to interact with environment | Mechanism that enables quick swapping of different end effectors or tools |
| Function | Perform specific tasks like gripping, welding, painting | Facilitates rapid tool change without manual intervention |
| Application | Task-specific operations | Multi-tool robotic systems requiring versatile operations |
| Flexibility | Limited to one tool per task | High, enables multiple tool usage in single robot |
| Cost Impact | Lower initial investment | Higher cost due to complex mechanism |
| Setup Time | Longer downtime for retooling | Minimal downtime, fast switching |
| Maintenance | Simple, fewer components | More complex, requires regular servicing |
| Example Industries | Manufacturing, packaging, assembly | Automotive, aerospace, electronics manufacturing |
Understanding End Effectors in Robotics
End effectors are specialized devices attached to the end of a robotic arm designed to interact with the environment, performing tasks such as gripping, welding, or painting. They differ from tool changers, which are mechanisms that enable robots to switch between multiple end effectors quickly, enhancing versatility and efficiency in complex operations. Understanding the specific functionality and compatibility of end effectors is crucial for optimizing robotic performance in industrial applications.
Introduction to Tool Changers
Tool changers enable robotic arms to switch end effectors automatically, increasing operational flexibility and reducing downtime in manufacturing processes. These devices consist of mechanical and electrical interfaces that ensure precise alignment, secure attachment, and reliable power or data transfer between the robot and various tools. By integrating tool changers, industrial robots can perform multiple tasks such as welding, gripping, or painting without manual intervention, enhancing efficiency and adaptability.
Key Functions of End Effectors
End effectors serve as the robotic arm's interface for interacting with environments by performing specific tasks such as gripping, welding, or painting. They are designed to execute precise functions like grasping objects, manipulating materials, or applying force, which directly influence the robot's capability and application scope. Unlike tool changers, which enable rapid switching between various tools, end effectors are specialized attachments tailored for distinct operational roles crucial to automation efficiency.
How Tool Changers Enhance Flexibility
Tool changers significantly enhance robotic system flexibility by enabling rapid swapping of end effectors without manual intervention, reducing downtime and increasing productivity. This automation supports complex tasks requiring diverse tools, such as welding, gripping, or painting, within a single workflow. Integrating intelligent tool changers allows seamless adaptation to variable operations, optimizing manufacturing processes in industries like automotive and electronics.
End Effector Types and Their Applications
End effectors in robotics encompass grippers, suction cups, welding torches, and sensors, each tailored for specific tasks like assembly, material handling, or inspection. Grippers handle precision tasks such as electronics assembly, while suction cups excel in delicate or flat surface manipulation in packaging industries. Welding torches are essential in automotive manufacturing, and vision sensors enable quality control and adaptive operations in industrial automation.
Tool Changer Mechanisms and Design
Tool changer mechanisms in robotics enable rapid switching between various end effectors, significantly enhancing operational flexibility and reducing downtime. These systems typically incorporate mechanical latching, electrical connectors, and pneumatic or hydraulic interfaces to ensure secure and efficient tool attachment. Advanced designs prioritize compactness, reliability, and ease of integration with robotic arms to support diverse manufacturing and automation applications.
Comparing Performance: End Effector vs Tool Changer
End effectors offer specialized functionality tailored for specific tasks such as gripping, welding, or assembly, often resulting in optimized precision and efficiency. Tool changers provide versatility by enabling rapid switching between multiple end effectors, enhancing overall robotic system flexibility without significant downtime. Performance comparison highlights that end effectors excel in task-specific optimization whereas tool changers maximize productivity through multi-tool adaptability.
Integration Challenges and Solutions
End effectors require precise compatibility with robotic arms, but tool changers offer modularity allowing rapid switching between multiple end effectors without manual intervention. Integration challenges include ensuring secure mechanical coupling, seamless electrical connectivity, and accurate communication protocols between the robot controller and attached tools. Solutions involve standardized interfaces, robust sensor feedback systems, and adaptive control algorithms to maintain real-time coordination and performance reliability.
Cost Analysis: End Effector vs Tool Changer
End effectors typically present lower initial costs compared to tool changers, which require complex mechanisms and integration into robotic arms. Maintenance expenses for tool changers tend to be higher due to their mechanical intricacy and increased wear from frequent tool swaps. Evaluating total cost of ownership involves assessing not only purchase price but also downtime, flexibility in production, and long-term operational efficiency.
Future Trends in End Effectors and Tool Changers
Future trends in end effectors emphasize enhanced dexterity, multi-functionality, and adaptive gripping technologies driven by AI and sensor integration, enabling robots to perform complex tasks with precision. Tool changers are evolving toward faster, more reliable, and wireless connections, supporting seamless transitions between diverse tools to increase operational efficiency in automated manufacturing. Integration of smart materials and IoT connectivity in both end effectors and tool changers facilitates real-time monitoring and predictive maintenance, reducing downtime and extending equipment lifespan.
End effector vs Tool changer Infographic