On-board computation processes data directly within the robot, enabling low latency and real-time decision-making critical for autonomous operations. Edge computation offloads intensive tasks to nearby servers, enhancing processing power while reducing the robot's hardware demands and energy consumption. Balancing on-board and edge computation optimizes responsiveness and efficiency in robotic systems deployed in complex environments.
Table of Comparison
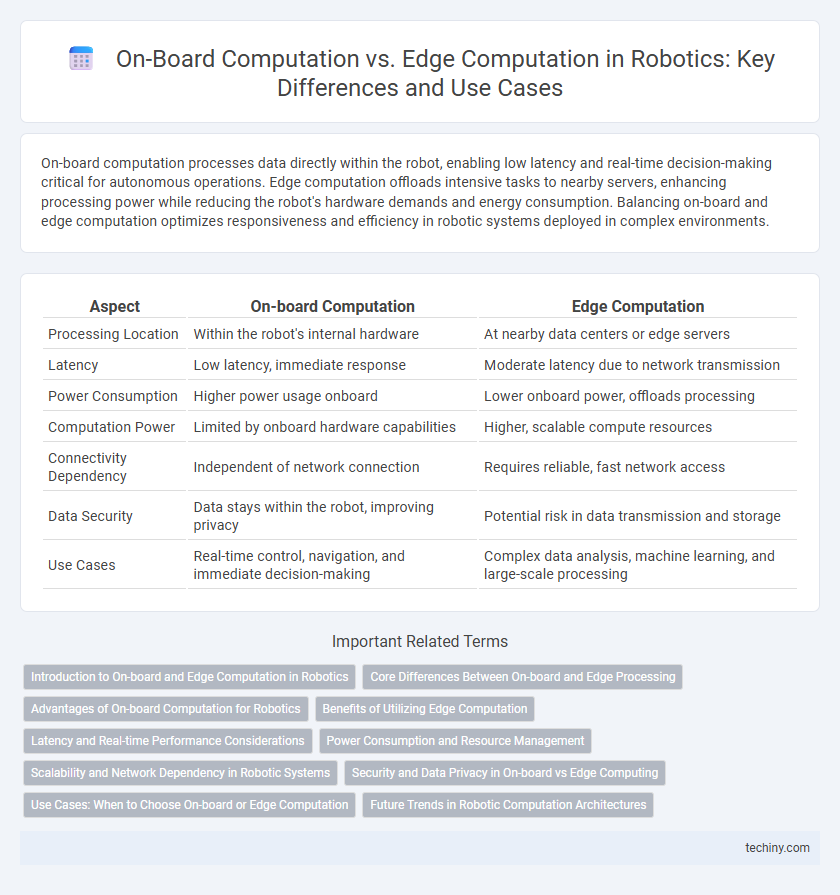
| Aspect | On-board Computation | Edge Computation |
|---|---|---|
| Processing Location | Within the robot's internal hardware | At nearby data centers or edge servers |
| Latency | Low latency, immediate response | Moderate latency due to network transmission |
| Power Consumption | Higher power usage onboard | Lower onboard power, offloads processing |
| Computation Power | Limited by onboard hardware capabilities | Higher, scalable compute resources |
| Connectivity Dependency | Independent of network connection | Requires reliable, fast network access |
| Data Security | Data stays within the robot, improving privacy | Potential risk in data transmission and storage |
| Use Cases | Real-time control, navigation, and immediate decision-making | Complex data analysis, machine learning, and large-scale processing |
Introduction to On-board and Edge Computation in Robotics
On-board computation in robotics refers to processing data directly on the robot using integrated hardware components such as CPUs, GPUs, and specialized accelerators, enabling real-time decision-making and reduced latency. Edge computation offloads data processing to nearby edge servers or devices, allowing robots to leverage higher computational power and storage while maintaining relatively low latency compared to cloud computing. This balance between on-board and edge computation enhances robot performance in tasks requiring quick responses and complex data analysis, optimizing resource use and energy efficiency.
Core Differences Between On-board and Edge Processing
On-board computation enables robots to process data locally using onboard CPUs and GPUs, resulting in low-latency response and enhanced real-time decision-making crucial for autonomous navigation and manipulation tasks. Edge computation, by contrast, relies on external servers or edge devices connected via networks, offering higher computational power and storage capacity but introducing potential latency due to data transmission. The core differences lie in the trade-offs between immediate processing speed and resource scalability, where on-board processing prioritizes autonomy and real-time control, while edge processing supports complex analytics and large-scale data aggregation.
Advantages of On-board Computation for Robotics
On-board computation in robotics offers significant advantages, including reduced latency and real-time processing by eliminating dependency on external networks. This local processing enhances autonomy and reliability, crucial for applications requiring immediate decision-making such as autonomous navigation and obstacle avoidance. Moreover, on-board systems improve data security by minimizing the transmission of sensitive sensor data over potentially vulnerable communication channels.
Benefits of Utilizing Edge Computation
Edge computation enhances robotics by processing data locally, reducing latency and enabling real-time decision-making critical for autonomous navigation and obstacle avoidance. It decreases bandwidth usage and reliance on cloud connectivity, improving operational reliability in remote or dynamic environments. By distributing computational tasks to edge devices, robots achieve greater energy efficiency and scalability in complex applications.
Latency and Real-time Performance Considerations
On-board computation in robotics minimizes latency by processing data directly within the robot's hardware, ensuring immediate response times critical for real-time performance in dynamic environments. Edge computation introduces slight communication delays but allows more complex data processing and resource-intensive tasks close to the robot, balancing responsiveness with computational power. Prioritizing on-board computation is essential for latency-sensitive applications like autonomous navigation, while edge computation suits scenarios requiring advanced analytics without compromising critical real-time control.
Power Consumption and Resource Management
On-board computation in robotics demands higher power consumption due to the need for processing data locally with limited hardware resources, often resulting in constrained battery life. Edge computation offloads intensive processing to nearby servers, optimizing resource management by balancing workloads and reducing the robot's energy usage. Efficient power management strategies and resource allocation are critical in robotics to enhance operational time and maintain system performance during complex tasks.
Scalability and Network Dependency in Robotic Systems
On-board computation in robotic systems enhances scalability by enabling autonomous processing without relying on external networks, thus reducing latency and increasing reliability in dynamic environments. Edge computation offloads intensive tasks to nearby servers, improving scalability for complex applications but remains dependent on stable, low-latency network connections to maintain real-time responsiveness. Balancing on-board and edge computation optimizes scalability while minimizing network dependency, essential for robust and efficient robotic system performance.
Security and Data Privacy in On-board vs Edge Computing
On-board computation in robotics enhances security and data privacy by processing sensitive information locally, reducing exposure to external networks and minimizing risks of data breaches. Edge computing involves transmitting data to nearby servers, which can introduce vulnerabilities through data interception or unauthorized access during transmission. Localized on-board processing ensures tighter control over data access and compliance with privacy regulations critical in autonomous robotic operations.
Use Cases: When to Choose On-board or Edge Computation
On-board computation excels in real-time decision-making scenarios such as autonomous drones and industrial robots where low latency and immediate responsiveness are critical. Edge computation is preferred for tasks requiring heavy data processing and aggregation, like surveillance robots analyzing large video streams or collaborative robot fleets sharing sensor data. Choosing on-board or edge computation depends on factors like network reliability, power constraints, and the complexity of AI models deployed in robotic applications.
Future Trends in Robotic Computation Architectures
Future trends in robotic computation architectures emphasize the integration of on-board computation with edge computing to balance processing speed and energy efficiency. Advances in AI accelerators on robots are enabling real-time data analysis locally, reducing latency critical for autonomous navigation and manipulation. Edge computing infrastructures complement this by providing scalable resources for heavy model training and complex scenario simulations, enhancing overall system intelligence.
On-board computation vs Edge computation Infographic