Continuous path control enables robots to follow precise, smooth trajectories essential for tasks like welding or painting, where consistent motion is critical. Point-to-point control directs the robot from one discrete position to another, optimizing speed and efficiency in applications like pick-and-place operations. Choosing between continuous path and point-to-point control depends on the required accuracy, motion smoothness, and specific task demands in robotic automation.
Table of Comparison
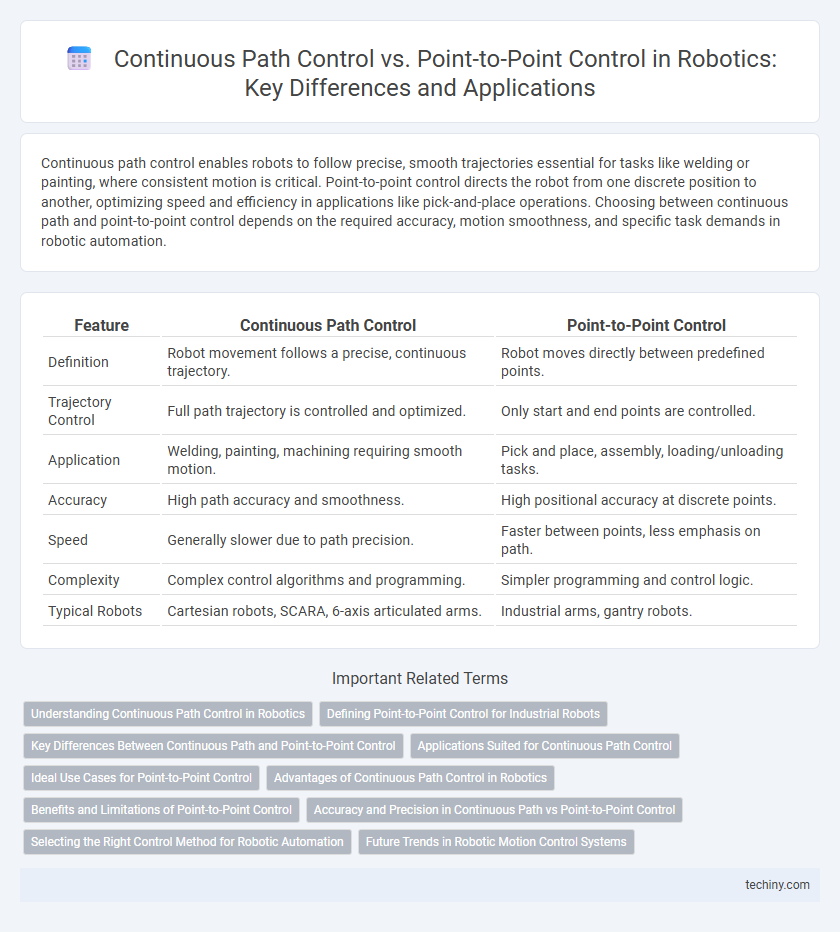
| Feature | Continuous Path Control | Point-to-Point Control |
|---|---|---|
| Definition | Robot movement follows a precise, continuous trajectory. | Robot moves directly between predefined points. |
| Trajectory Control | Full path trajectory is controlled and optimized. | Only start and end points are controlled. |
| Application | Welding, painting, machining requiring smooth motion. | Pick and place, assembly, loading/unloading tasks. |
| Accuracy | High path accuracy and smoothness. | High positional accuracy at discrete points. |
| Speed | Generally slower due to path precision. | Faster between points, less emphasis on path. |
| Complexity | Complex control algorithms and programming. | Simpler programming and control logic. |
| Typical Robots | Cartesian robots, SCARA, 6-axis articulated arms. | Industrial arms, gantry robots. |
Understanding Continuous Path Control in Robotics
Continuous path control in robotics enables precise, smooth movement along a specified trajectory, essential for applications like welding, painting, and machining. Unlike point-to-point control, which moves the robot from one discrete position to another, continuous path control maintains constant velocity and orientation, ensuring accuracy and surface quality. Advanced algorithms in continuous path control optimize path interpolation, motion planning, and real-time corrections to handle complex tasks requiring fluid and uninterrupted robot arm motion.
Defining Point-to-Point Control for Industrial Robots
Point-to-point control in industrial robots involves moving the robot arm from one discrete position to another without explicit control over the path taken between points. This control method prioritizes the accuracy of the end positions rather than the trajectory, making it ideal for tasks like pick-and-place or assembly operations where exact locations are critical but intermediate motion is less important. Typically, point-to-point control uses predefined coordinates and emphasizes speed and precision at target points rather than continuous path precision.
Key Differences Between Continuous Path and Point-to-Point Control
Continuous path control enables robotic arms to follow a precise, uninterrupted trajectory crucial for tasks like welding or painting, where path accuracy affects quality. Point-to-point control moves the robot between predefined positions without controlling the intermediate path, optimizing speed for pick-and-place operations or simple assembly. The fundamental difference lies in trajectory management: continuous path control demands real-time path execution, while point-to-point control focuses on endpoint accuracy with less concern for the route taken.
Applications Suited for Continuous Path Control
Continuous path control excels in applications requiring precise, smooth robot movements along complex trajectories, such as welding, painting, and milling in industrial automation. Robots guided by continuous path control maintain constant velocity and orientation, enabling seamless execution of tasks involving intricate shapes or surfaces. This control method optimizes performance in sectors like automotive manufacturing, aerospace assembly, and 3D printing where accuracy and fluid motion are critical.
Ideal Use Cases for Point-to-Point Control
Point-to-point control is ideal for applications requiring precise positioning between discrete locations, such as assembly tasks, pick-and-place operations, and spot welding. This method optimizes cycle times by focusing on accuracy at specific points rather than the trajectory, making it suitable for processes involving distinct, repetitive motions. Industries like automotive manufacturing and electronics benefit from point-to-point control due to its efficiency in handling tasks with defined start and end positions.
Advantages of Continuous Path Control in Robotics
Continuous path control in robotics offers superior precision and smoothness in executing complex trajectories, enabling robots to perform intricate tasks such as welding, painting, and assembly with high accuracy. This control method allows real-time speed and position adjustments along the entire path, enhancing flexibility and reducing mechanical wear by minimizing abrupt movements. Continuous path control is essential for applications requiring seamless motion and consistent tool orientation, improving overall productivity and product quality.
Benefits and Limitations of Point-to-Point Control
Point-to-point control in robotics offers simplicity and efficiency by directing the robot to move from one discrete position to another without concern for the trajectory or intermediate points. This method reduces programming complexity and is ideal for tasks such as pick-and-place operations where path precision is less critical. However, point-to-point control limits smooth motion and precise path following, making it unsuitable for complex trajectories or continuous manufacturing processes requiring high accuracy and seamless movement.
Accuracy and Precision in Continuous Path vs Point-to-Point Control
Continuous path control provides higher accuracy and precision by maintaining smooth, uninterrupted motion along a defined trajectory, essential for applications like welding and painting. Point-to-point control focuses on reaching specific positions accurately but lacks the continuous feedback mechanism, resulting in lower precision during movement between points. Continuous path control's real-time corrections minimize deviations, enhancing the robot's overall spatial accuracy compared to the segmented approach of point-to-point control.
Selecting the Right Control Method for Robotic Automation
Selecting the right control method in robotic automation critically impacts precision, speed, and application suitability. Continuous path control excels in tasks requiring smooth, uninterrupted motion such as welding and painting, enabling precise trajectory following through real-time interpolation of waypoints. Point-to-point control optimizes efficiency for discrete operations like pick-and-place by moving directly between predefined coordinates without concern for path continuity.
Future Trends in Robotic Motion Control Systems
Future trends in robotic motion control systems emphasize the integration of continuous path control for smoother and more precise movements, essential in applications like autonomous vehicles and advanced manufacturing. Continuous path control enables robots to execute complex trajectories with real-time adjustments, outperforming traditional point-to-point control that only targets discrete positions. Advances in AI-driven algorithms and sensor fusion technologies are driving the evolution of continuous path control, enhancing adaptability and efficiency in dynamic, unstructured environments.
Continuous path control vs Point-to-point control Infographic