Point-to-point motion moves a robot from one discrete location to another without controlling the path taken, ideal for tasks like pick-and-place operations. Continuous path motion guides the robot along a precise trajectory, ensuring smooth transitions and accurate path following, which is essential for applications such as welding or painting. Selecting between these motions depends on the task requirements for speed, accuracy, and path control in robotic automation.
Table of Comparison
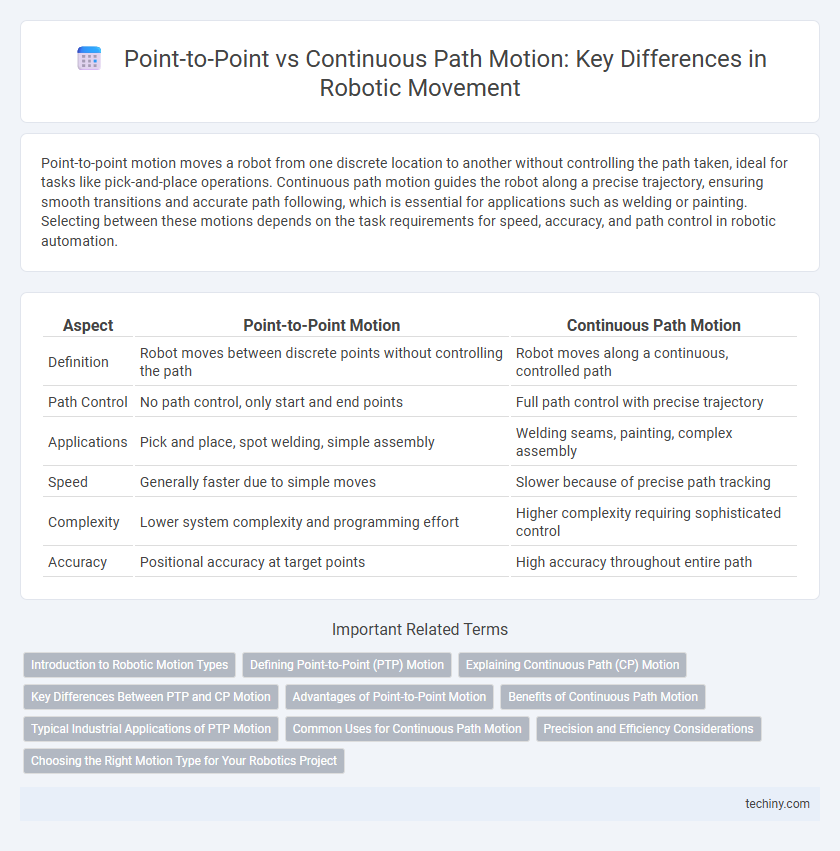
| Aspect | Point-to-Point Motion | Continuous Path Motion |
|---|---|---|
| Definition | Robot moves between discrete points without controlling the path | Robot moves along a continuous, controlled path |
| Path Control | No path control, only start and end points | Full path control with precise trajectory |
| Applications | Pick and place, spot welding, simple assembly | Welding seams, painting, complex assembly |
| Speed | Generally faster due to simple moves | Slower because of precise path tracking |
| Complexity | Lower system complexity and programming effort | Higher complexity requiring sophisticated control |
| Accuracy | Positional accuracy at target points | High accuracy throughout entire path |
Introduction to Robotic Motion Types
Point-to-point motion controls a robot to move precisely between defined coordinates without regard for the path taken, optimizing speed and simplicity in assembly or pick-and-place tasks. Continuous path motion governs the robot's movement along a specific trajectory, ensuring smooth, uninterrupted motion essential for welding, painting, or complex machining. Understanding these two core robotic motion types enhances programming efficiency and precision in industrial automation.
Defining Point-to-Point (PTP) Motion
Point-to-Point (PTP) motion in robotics refers to the movement of a robot's end effector from one specified position to another without controlling the path taken between these points. This motion is optimized for speed and efficiency, focusing on precise start and end coordinates rather than the trajectory. PTP motion is commonly used in tasks like pick-and-place operations where only the final positions are critical.
Explaining Continuous Path (CP) Motion
Continuous Path (CP) Motion in robotics refers to movements where the robot's end effector follows a smooth, uninterrupted trajectory, maintaining control over all degrees of freedom throughout the motion. This type of motion is critical in applications requiring precise path accuracy, such as welding, painting, and complex assembly tasks. By continuously adjusting position, orientation, and velocity, CP motion ensures high-quality results and reduces errors compared to Point-to-Point (PTP) motion.
Key Differences Between PTP and CP Motion
Point-to-Point (PTP) motion in robotics focuses on moving the robot's end effector to discrete target locations with high precision, optimizing for positioning accuracy without strict path constraints. Continuous Path (CP) motion requires the robot to follow a predefined trajectory smoothly, maintaining constant control over velocity and acceleration for applications involving welding, painting, or machining. PTP is ideal for pick-and-place tasks where only the endpoints matter, whereas CP is critical for tasks needing exact adherence to complex paths ensuring quality and consistency.
Advantages of Point-to-Point Motion
Point-to-point motion in robotics offers precise control by moving a robot from one discrete position to another, minimizing programming complexity and improving cycle time efficiency for tasks such as pick-and-place operations. This motion type enhances repeatability and accuracy, making it ideal for assembly lines requiring consistent positioning without the need for complex path following. Point-to-point motion reduces computational load compared to continuous path motion, allowing faster execution in industrial automation environments.
Benefits of Continuous Path Motion
Continuous path motion enables robots to execute smooth and precise trajectories, enhancing accuracy in complex tasks like welding, painting, and milling. This motion type allows for real-time adjustments and path corrections, improving product quality and reducing material waste. Improved kinematic control in continuous path motion also boosts operational efficiency and tool longevity in advanced manufacturing environments.
Typical Industrial Applications of PTP Motion
Point-to-point (PTP) motion is predominantly utilized in industrial robotics for tasks requiring precise positioning without concern for the trajectory between points, such as pick-and-place operations, machine loading/unloading, and assembly line transfers. PTP motion optimizes cycle time and accuracy in scenarios where the robot's end-effector must move rapidly between discrete locations, making it ideal for palletizing, packaging, and welding spot tasks. These applications benefit from PTP motion by maximizing throughput and reducing complexity in path planning compared to continuous path motion.
Common Uses for Continuous Path Motion
Continuous path motion in robotics is essential for applications requiring precise, smooth trajectories such as welding, painting, and assembly. Industrial robots use continuous path motion to maintain control over speed and orientation, ensuring high-quality finishes and accurate parts placement. This motion type is crucial in tasks that demand consistent tool positioning along complex paths for optimal performance.
Precision and Efficiency Considerations
Point-to-point motion in robotics offers high precision by targeting specific coordinates, making it ideal for tasks requiring exact positioning such as assembly or part placement. Continuous path motion enhances efficiency by enabling smooth, uninterrupted trajectories, optimizing speed and fluidity for applications like welding or painting. Balancing precision and efficiency depends on task complexity, with point-to-point excelling in accuracy and continuous path favoring consistent motion and throughput.
Choosing the Right Motion Type for Your Robotics Project
Selecting between Point-to-Point (PTP) motion and Continuous Path motion depends on the precision and speed requirements of your robotics project. PTP motion excels in applications where the robot moves rapidly between distinct positions without concern for the path, ideal for pick-and-place tasks. Continuous Path motion suits complex operations requiring smooth, precise trajectories, such as welding or painting, where maintaining exact path control is critical.
Point-to-Point Motion vs Continuous Path Motion Infographic