Redundant degrees of freedom (DOF) in robotics provide multiple ways to achieve the same end effector position, enhancing flexibility and obstacle avoidance. Constrained DOF limit the robot's movement to specific paths or functions, improving precision and control in tightly defined tasks. Balancing redundant and constrained DOF enables optimized robot performance across diverse applications.
Table of Comparison
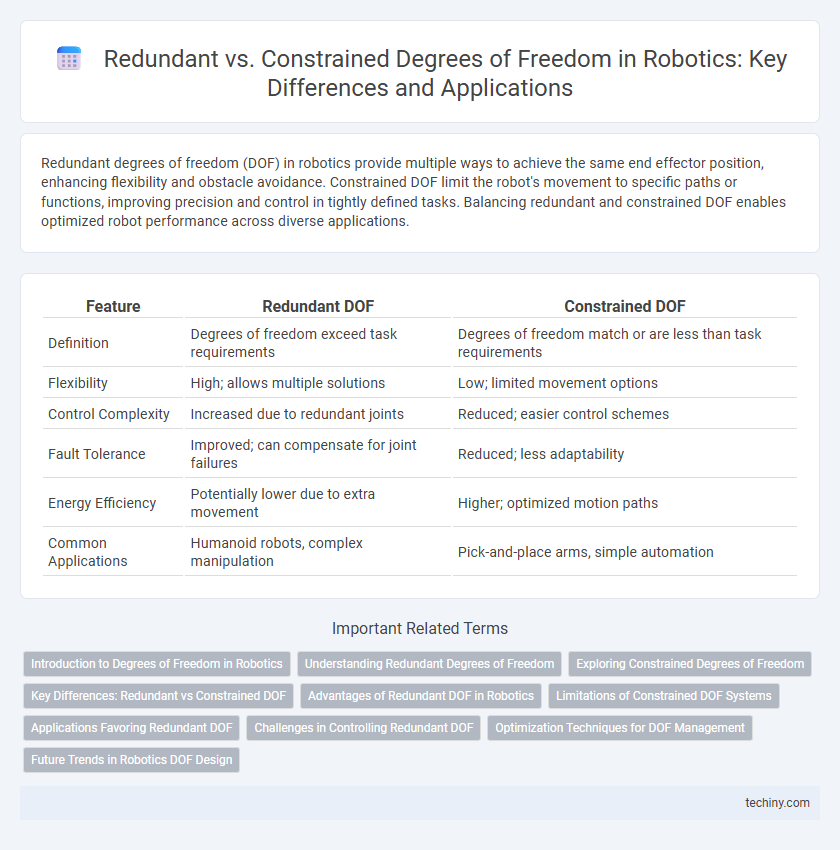
| Feature | Redundant DOF | Constrained DOF |
|---|---|---|
| Definition | Degrees of freedom exceed task requirements | Degrees of freedom match or are less than task requirements |
| Flexibility | High; allows multiple solutions | Low; limited movement options |
| Control Complexity | Increased due to redundant joints | Reduced; easier control schemes |
| Fault Tolerance | Improved; can compensate for joint failures | Reduced; less adaptability |
| Energy Efficiency | Potentially lower due to extra movement | Higher; optimized motion paths |
| Common Applications | Humanoid robots, complex manipulation | Pick-and-place arms, simple automation |
Introduction to Degrees of Freedom in Robotics
Degrees of Freedom (DOF) in robotics refer to the number of independent movements a robot can perform, fundamentally determining its flexibility and functionality. Redundant DOF means a robot has more joints than necessary for a specific task, enhancing adaptability and obstacle avoidance through multiple motion solutions. Constrained DOF limits robot mobility to essential movements, simplifying control algorithms but reducing versatility in complex environments.
Understanding Redundant Degrees of Freedom
Redundant degrees of freedom (DOF) in robotics occur when a manipulator has more joints than necessary to perform a specific task, allowing multiple configurations to achieve the same end-effector position. This redundancy enhances dexterity, obstacle avoidance, and fault tolerance, as the robot can optimize joint angles for energy efficiency or minimize wear. In contrast, constrained DOF systems limit movement to essential joints, reducing complexity but sacrificing flexibility and adaptability in dynamic environments.
Exploring Constrained Degrees of Freedom
Exploring constrained degrees of freedom (DOF) in robotics enables precise control and stability within limited motion ranges, essential for tasks requiring accuracy in confined spaces. Unlike redundant DOF, which offer multiple joint configurations to achieve a single end-effector position, constrained DOF limit robot movements to essential axes, reducing complexity and computational load. Focusing on constrained DOF optimizes path planning and enhances the reliability of robotic manipulators in industrial automation and surgical robotics.
Key Differences: Redundant vs Constrained DOF
Redundant degrees of freedom (DOF) in robotics refer to systems where the robot has more joints or actuators than necessary to perform a specific task, enabling greater flexibility and fault tolerance. Constrained DOF indicates a system with exactly the required number of joint parameters, limiting movement to a predefined path or task space, which simplifies control but reduces adaptability. Redundant DOF enhances path optimization and obstacle avoidance, while constrained DOF focuses on precision and reduced computational complexity.
Advantages of Redundant DOF in Robotics
Redundant degrees of freedom (DOF) in robotics enable enhanced maneuverability and adaptability, allowing robotic systems to perform complex tasks in constrained environments with greater precision. These additional DOFs improve fault tolerance and facilitate obstacle avoidance by providing alternative motion paths, which is critical for applications like robotic surgery and autonomous manipulation. Redundant DOF also contribute to optimized energy efficiency and load distribution, extending the operational lifespan of robotic joints and actuators.
Limitations of Constrained DOF Systems
Constrained degrees of freedom (DOF) systems in robotics face significant limitations in flexibility and adaptability, restricting the robot's ability to maneuver in complex environments. These systems exhibit reduced capability to avoid obstacles and perform tasks requiring intricate movement paths due to their limited joint configurations. The lack of redundancy in DOF also results in decreased fault tolerance, making constrained robots more vulnerable to failure during operations.
Applications Favoring Redundant DOF
Redundant degrees of freedom (DOF) in robotics enhance maneuverability and flexibility, allowing robots to navigate complex environments and perform intricate tasks such as assembly, surgery, and inspection with higher precision. Applications favoring redundant DOF leverage the ability to avoid obstacles, optimize joint configurations, and maintain stability while executing tasks in constrained spaces. These advantages make redundant DOF systems essential in advanced manipulation, humanoid robotics, and collaborative robots where adaptability and dexterity are critical.
Challenges in Controlling Redundant DOF
Controlling redundant degrees of freedom (DOF) in robotics presents significant challenges due to the infinite possible joint configurations that achieve the same end-effector position, requiring advanced algorithms to resolve ambiguity. Inverse kinematics for redundant manipulators demands optimization techniques to balance criteria such as collision avoidance, energy efficiency, and joint limits, which complicates real-time control. Sensor noise, model inaccuracies, and dynamic environments further exacerbate control complexity, necessitating robust feedback mechanisms and adaptive control strategies.
Optimization Techniques for DOF Management
Optimization techniques for managing Degrees of Freedom (DOF) in robotics critically enhance performance by balancing Redundant DOF and Constrained DOF. Algorithms such as inverse kinematics with null-space projection exploit Redundant DOF to optimize secondary objectives like obstacle avoidance and energy efficiency, while constrained optimization methods ensure task-specific requirements are met. Advanced model predictive control and machine learning approaches dynamically allocate DOF to improve precision, adaptability, and overall system robustness in complex environments.
Future Trends in Robotics DOF Design
Future trends in robotics DOF design emphasize the integration of redundant DOF to enhance flexibility, adaptability, and fault tolerance in complex tasks. Constrained DOF designs, while simpler, limit robot versatility and are increasingly being supplemented by advanced control algorithms that exploit redundancy for optimized performance. Emerging technologies in sensor fusion and AI-driven motion planning are driving the development of robots with intelligent, context-aware DOF configurations.
Redundant DOF vs Constrained DOF Infographic