Path planning involves determining an optimal route from a start point to a destination within a given environment, focusing on avoiding obstacles and minimizing distance or time. Motion planning extends beyond path planning by incorporating dynamic constraints of the robot, such as velocity, acceleration, and kinematics, to generate feasible trajectories that ensure safe and efficient movement. Effective integration of both path and motion planning is essential for autonomous robots to navigate complex environments safely and accurately.
Table of Comparison
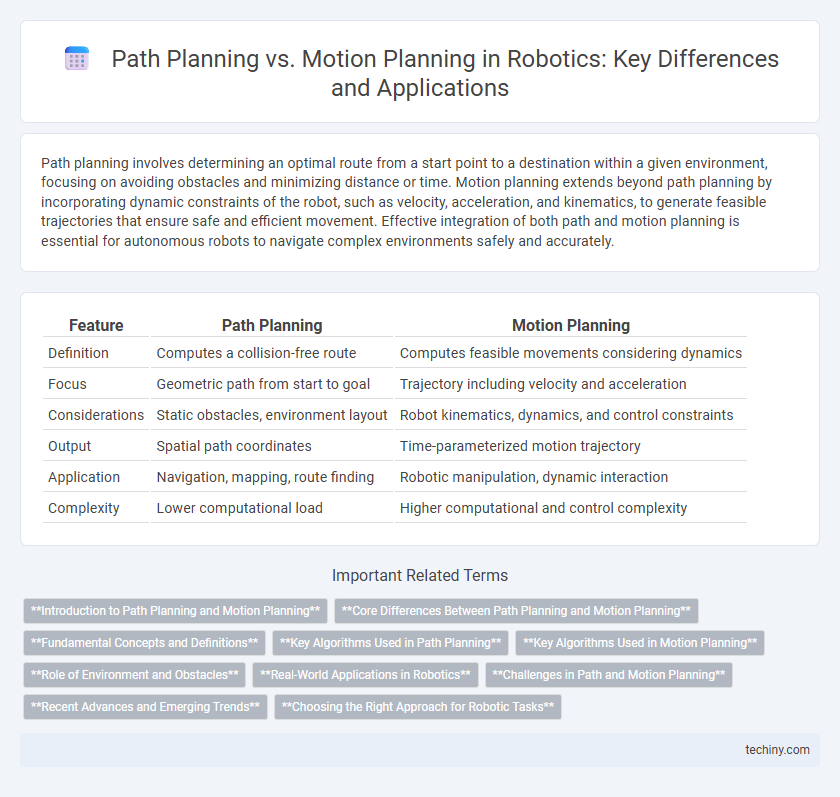
| Feature | Path Planning | Motion Planning |
|---|---|---|
| Definition | Computes a collision-free route | Computes feasible movements considering dynamics |
| Focus | Geometric path from start to goal | Trajectory including velocity and acceleration |
| Considerations | Static obstacles, environment layout | Robot kinematics, dynamics, and control constraints |
| Output | Spatial path coordinates | Time-parameterized motion trajectory |
| Application | Navigation, mapping, route finding | Robotic manipulation, dynamic interaction |
| Complexity | Lower computational load | Higher computational and control complexity |
Introduction to Path Planning and Motion Planning
Path planning in robotics involves determining a feasible route from a start to a goal position within an environment, emphasizing the spatial trajectory without detailing the robot's movement dynamics. Motion planning expands on this by integrating the robot's kinematic and dynamic constraints to generate executable control inputs, ensuring smooth and collision-free transitions through the planned path. Both path and motion planning utilize algorithms such as A*, RRT, and Dijkstra to navigate complex environments while balancing computational efficiency and accuracy.
Core Differences Between Path Planning and Motion Planning
Path planning focuses on determining a collision-free route from the start to the goal position, emphasizing the geometric aspect of navigating through an environment. Motion planning extends beyond path planning by incorporating kinematic and dynamic constraints, including velocity, acceleration, and the robot's mechanical limitations to generate feasible trajectories. Core differences lie in path planning's focus on spatial navigation while motion planning addresses temporal coordination and control for smooth, executable movements.
Fundamental Concepts and Definitions
Path planning in robotics involves determining a collision-free route from a start point to a goal point within the robot's environment, focusing primarily on the geometric or spatial aspects. Motion planning extends path planning by incorporating the robot's kinematic and dynamic constraints, such as velocity, acceleration, and collision avoidance, to generate feasible trajectories. Fundamental distinctions highlight that path planning outputs a geometric path, while motion planning produces time-parameterized movements executable by the robot.
Key Algorithms Used in Path Planning
Key algorithms used in path planning include A*, Dijkstra's algorithm, Rapidly-exploring Random Trees (RRT), and Probabilistic Roadmaps (PRM), which efficiently compute feasible routes by considering robot kinematics and environmental obstacles. A* excels in grid-based maps with heuristic optimization, while Dijkstra's algorithm guarantees shortest paths in weighted graphs without heuristic guidance. RRT and PRM are sampling-based methods ideal for high-dimensional spaces, enabling complex robot navigation in dynamic environments.
Key Algorithms Used in Motion Planning
Key algorithms used in motion planning include Rapidly-exploring Random Trees (RRT), Probabilistic Roadmaps (PRM), and A* search, which efficiently navigate complex environments by considering the robot's kinematics and dynamics. These algorithms generate feasible trajectories by balancing obstacle avoidance, path optimality, and computational efficiency. Incorporating optimization methods like D* and Fast Marching Methods further enhances real-time adaptability in dynamic and uncertain scenarios.
Role of Environment and Obstacles
Path planning primarily focuses on identifying a collision-free route by analyzing the environment and obstacles, ensuring the robot navigates from start to goal points efficiently. Motion planning incorporates dynamic constraints and robot kinematics, adapting movements in real-time to avoid obstacles and respond to changing environments. Both processes rely heavily on accurate environmental mapping and obstacle detection to optimize safe and feasible navigation paths.
Real-World Applications in Robotics
Path planning focuses on determining an optimal route for a robot from a start to a goal position, often using algorithms like A*, D*, or RRT to navigate static environments efficiently. Motion planning extends beyond path planning by incorporating dynamic constraints, robot kinematics, and collision avoidance in real-time, crucial for applications like autonomous vehicles, robotic arms in manufacturing, and drones navigating complex, changing terrains. Real-world robotics rely heavily on integrated path and motion planning to achieve safe, efficient, and adaptive task execution in environments with obstacles, uncertainty, and dynamic elements.
Challenges in Path and Motion Planning
Path planning and motion planning in robotics face significant challenges such as navigating dynamic and uncertain environments where sensor noise and unpredictable obstacles complicate trajectory generation. High-dimensional configuration spaces require efficient algorithms to balance computational complexity with real-time responsiveness, especially in cluttered or partially known terrains. Ensuring collision avoidance while optimizing for criteria like shortest path, energy consumption, or smoothness demands robust heuristic and probabilistic methods to address uncertainties and kinematic constraints.
Recent Advances and Emerging Trends
Recent advances in path planning emphasize deep reinforcement learning and graph neural networks to improve adaptability in dynamic environments, while motion planning increasingly integrates real-time sensor fusion and predictive modeling for more precise trajectory execution. Emerging trends highlight the convergence of data-driven methods with classical optimization algorithms, enabling robust navigation in complex, unstructured settings. The integration of multi-modal sensory inputs with AI enhances autonomy and flexibility in robotic systems operating in unpredictable scenarios.
Choosing the Right Approach for Robotic Tasks
Path planning focuses on finding an optimal route for a robot from start to goal while avoiding obstacles, making it ideal for navigation tasks in structured environments. Motion planning extends path planning by incorporating the robot's kinematics, dynamics, and constraints, ensuring feasible and collision-free movements in complex, dynamic settings. Selecting the right approach depends on task requirements, environment complexity, and robot capabilities to maximize efficiency and accuracy in robotic operations.
Path planning vs Motion planning Infographic