Degrees of freedom (DOF) in robotics define the number of independent movements a robot can perform, directly influencing its flexibility and range of motion. Redundancy occurs when a robot has more DOF than necessary to complete a given task, enabling enhanced maneuverability and obstacle avoidance. This surplus of DOF allows for optimized control strategies, improving precision and adaptability in complex environments.
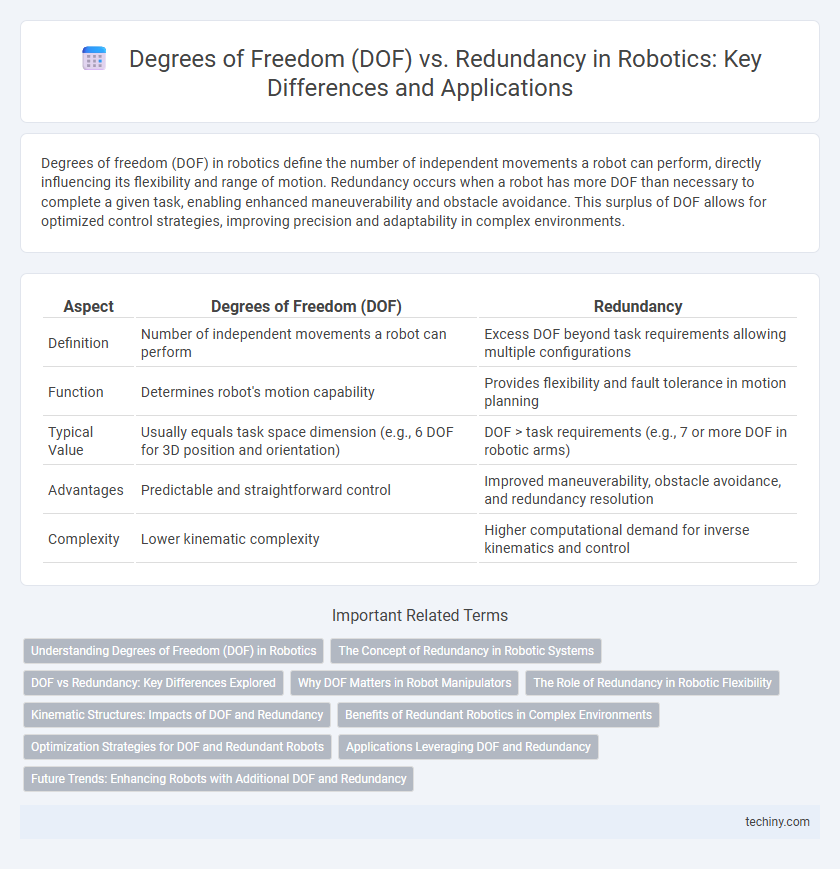
Table of Comparison
| Aspect | Degrees of Freedom (DOF) | Redundancy |
|---|---|---|
| Definition | Number of independent movements a robot can perform | Excess DOF beyond task requirements allowing multiple configurations |
| Function | Determines robot's motion capability | Provides flexibility and fault tolerance in motion planning |
| Typical Value | Usually equals task space dimension (e.g., 6 DOF for 3D position and orientation) | DOF > task requirements (e.g., 7 or more DOF in robotic arms) |
| Advantages | Predictable and straightforward control | Improved maneuverability, obstacle avoidance, and redundancy resolution |
| Complexity | Lower kinematic complexity | Higher computational demand for inverse kinematics and control |
Understanding Degrees of Freedom (DOF) in Robotics
Degrees of Freedom (DOF) in robotics refer to the number of independent movements a robot can perform, typically measured by the count of rotary or linear joints. Understanding DOF is crucial for designing robotic systems capable of precise and complex tasks, as it directly influences the robot's range of motion and dexterity. Redundancy occurs when a robot has more DOF than necessary for a task, enabling it to avoid obstacles and optimize movements while maintaining the primary objective.
The Concept of Redundancy in Robotic Systems
Redundancy in robotic systems occurs when the number of degrees of freedom (DOF) exceeds the minimum required to perform a specific task, allowing multiple joint configurations to achieve the same end-effector position. This surplus of DOF enhances manipulability, fault tolerance, and flexibility in obstacle avoidance, making robots more adaptable in complex environments. Redundancy resolution techniques optimize joint movements to improve efficiency and precision while maintaining task constraints.
DOF vs Redundancy: Key Differences Explored
Degrees of freedom (DOF) in robotics refer to the number of independent movements a robot joint or system can perform, typically quantified by the axes of motion such as translation and rotation. Redundancy occurs when a robot possesses more DOF than necessary to complete a specific task, enabling multiple possible configurations that achieve the same end-effector position. Understanding the distinction between DOF and redundancy is crucial for optimizing robot control, as redundancy enhances flexibility and obstacle avoidance but increases computational complexity in inverse kinematics.
Why DOF Matters in Robot Manipulators
Degrees of freedom (DOF) in robot manipulators define the number of independent movements a robot arm can perform, directly impacting its ability to maneuver and position tools precisely in three-dimensional space. Redundancy occurs when a robot possesses more DOF than the minimum required to perform a task, enhancing flexibility, obstacle avoidance, and dexterity in complex environments. Higher DOF are critical for applications demanding intricate manipulation, as they allow robots to optimize trajectories, maintain stability, and adapt to dynamic conditions effectively.
The Role of Redundancy in Robotic Flexibility
Redundancy in robotic systems occurs when the degrees of freedom (DOF) exceed the minimum required to perform a task, enhancing flexibility and adaptability during operation. This surplus of DOF allows robots to optimize movements, avoid obstacles, and maintain functionality despite joint failures or environmental changes. Exploiting redundancy improves trajectory planning and task execution, enabling robots to perform complex maneuvers with increased precision and robustness.
Kinematic Structures: Impacts of DOF and Redundancy
Degrees of freedom (DOF) in robotic kinematic structures define the number of independent motions a robot can perform, directly influencing its maneuverability and task adaptability. Redundancy occurs when a robot has more DOF than necessary for a task, enabling enhanced flexibility, obstacle avoidance, and optimization of motion trajectories. High redundancy improves fault tolerance and dexterity but requires complex control algorithms to manage the increased computational demand in path planning and real-time adjustments.
Benefits of Redundant Robotics in Complex Environments
Redundant robotics, characterized by having more degrees of freedom (DOF) than minimally required for a task, offer enhanced adaptability and fault tolerance in complex environments. This redundancy allows robotic systems to optimize motion paths, avoid obstacles more effectively, and maintain functionality despite individual joint failures. Consequently, robots with higher DOF improve precision, flexibility, and robustness in dynamic and unpredictable operational settings.
Optimization Strategies for DOF and Redundant Robots
Optimization strategies for degrees of freedom (DOF) in robotics focus on enhancing control precision and task execution efficiency by selecting the minimal necessary DOF for specific applications. In redundant robots, where DOF exceed task requirements, optimization leverages algorithms like null space projection and optimization-based motion planning to exploit redundancy for obstacle avoidance, energy minimization, and dexterity enhancement. Techniques such as inverse kinematics optimization and real-time adaptive control improve performance by dynamically adjusting joint configurations to meet constraints and optimize secondary objectives.
Applications Leveraging DOF and Redundancy
Degrees of freedom (DOF) in robotics define the number of independent movements a robot can perform, directly influencing its versatility and precision in tasks such as assembly, painting, and surgery. Redundancy occurs when a robot has more DOF than necessary to complete a task, enabling enhanced flexibility, obstacle avoidance, and fault tolerance in complex environments like autonomous navigation and human-robot interaction. Applications leveraging DOF and redundancy optimize robotic manipulators' positioning and orientation, improving efficiency in industrial automation and adaptive control systems.
Future Trends: Enhancing Robots with Additional DOF and Redundancy
Future trends in robotics emphasize increasing degrees of freedom (DOF) and redundancy to boost robot dexterity and fault tolerance. Enhanced DOF allows for more precise and complex movements, while redundancy improves reliability by enabling alternative paths for task execution. Integrating advanced sensors and AI-driven control systems further optimizes these improvements, leading to versatile and resilient robotic platforms.
Degrees of freedom (DOF) vs Redundancy Infographic