Holonomic robots have motion capabilities that allow movement in any direction on a plane, offering greater flexibility and precision due to their ability to control all degrees of freedom independently. Non-holonomic robots face constraints in their movement, often requiring complex maneuvers to reach a target position because they cannot move directly sideways. Selecting between holonomic and non-holonomic robots impacts navigation strategies, path planning, and the complexity of control algorithms in robotic applications.
Table of Comparison
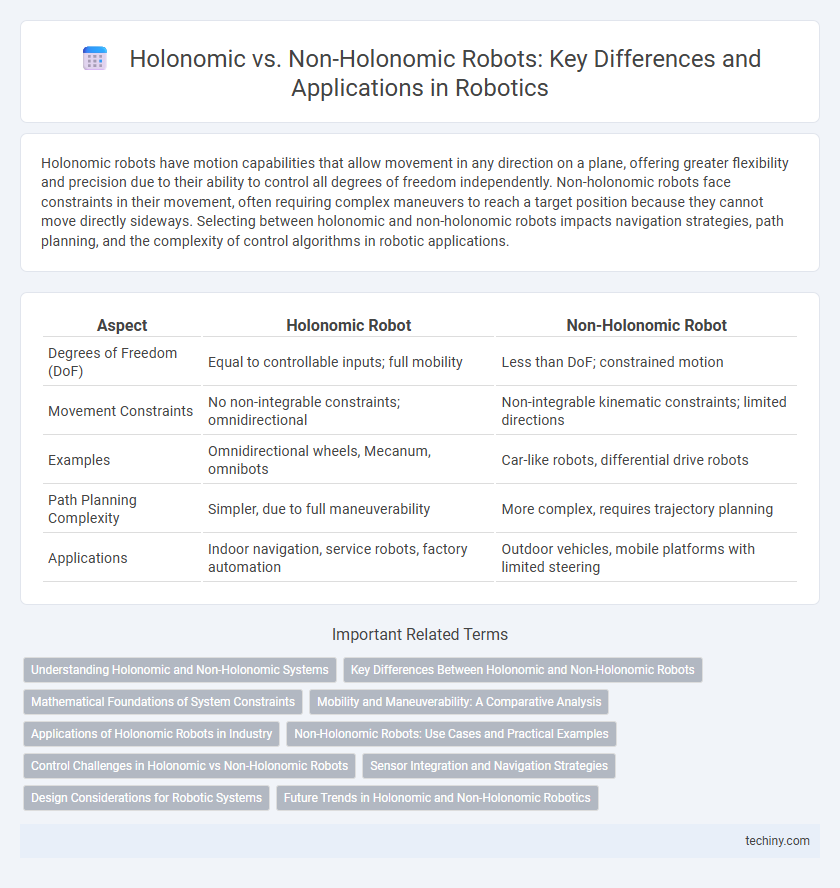
| Aspect | Holonomic Robot | Non-Holonomic Robot |
|---|---|---|
| Degrees of Freedom (DoF) | Equal to controllable inputs; full mobility | Less than DoF; constrained motion |
| Movement Constraints | No non-integrable constraints; omnidirectional | Non-integrable kinematic constraints; limited directions |
| Examples | Omnidirectional wheels, Mecanum, omnibots | Car-like robots, differential drive robots |
| Path Planning Complexity | Simpler, due to full maneuverability | More complex, requires trajectory planning |
| Applications | Indoor navigation, service robots, factory automation | Outdoor vehicles, mobile platforms with limited steering |
Understanding Holonomic and Non-Holonomic Systems
Holonomic systems in robotics allow motion in any direction within their configuration space, enabling precise and unrestricted maneuverability due to constraints represented by integrable equations. Non-holonomic systems impose non-integrable constraints, limiting instantaneous motion directions and requiring complex control strategies for tasks like path planning and navigation. Understanding the fundamental differences between holonomic and non-holonomic kinematics is essential for designing robots with appropriate mobility and control algorithms tailored to their operational environments.
Key Differences Between Holonomic and Non-Holonomic Robots
Holonomic robots possess three degrees of freedom, allowing movement in any direction without reorientation, while non-holonomic robots have fewer degrees of freedom, restricting their paths and necessitating maneuvers such as turning before moving laterally. The primary difference lies in motion constraints; holonomic systems achieve instantaneous direction changes due to independent wheel control, whereas non-holonomic robots, like car-like vehicles, face constraints preventing certain instantaneous movements. Understanding these distinctions is critical for robotic path planning, control algorithms, and applications requiring precise maneuverability and trajectory flexibility.
Mathematical Foundations of System Constraints
Holonomic systems in robotics are characterized by constraints that can be expressed as integrable equations relating the system's configuration variables, enabling direct control over position and orientation. Non-holonomic systems, on the other hand, involve non-integrable velocity constraints that do not reduce the system's degrees of freedom, complicating motion planning and control. The mathematical foundation of these constraints relies on differential geometry, where holonomic constraints correspond to exact differentials while non-holonomic constraints represent Pfaffian forms that restrict allowable velocities but not configurations.
Mobility and Maneuverability: A Comparative Analysis
Holonomic robots achieve full mobility with the ability to move instantaneously in any direction, thanks to mechanisms like omni-wheels or Mecanum wheels, enhancing maneuverability in constrained spaces. Non-holonomic robots, constrained by motion equations such as the differential drive model, can only move along paths defined by their steering limits, which restricts their lateral mobility and requires more complex path planning. This fundamental difference impacts real-time navigation tasks, making holonomic platforms ideal for dynamic environments requiring agile repositioning, while non-holonomic systems excel in scenarios prioritizing stability and predictable trajectories.
Applications of Holonomic Robots in Industry
Holonomic robots, characterized by their ability to move freely in any direction without restrictions, are extensively applied in automated warehouses and assembly lines for precise material handling and agile navigation in tight spaces. Their omnidirectional movement enhances efficiency in inventory management and complex manufacturing processes requiring high maneuverability. Industries such as automotive and electronics leverage holonomic robots to optimize workflow and reduce downtime in dynamic production environments.
Non-Holonomic Robots: Use Cases and Practical Examples
Non-holonomic robots, characterized by constraints in their motion such as limited degrees of freedom, are extensively utilized in applications like autonomous ground vehicles, mobile service robots, and robotic forklifts where precise path following and obstacle avoidance are critical. These robots excel in environments requiring navigation through constrained spaces or uneven terrains, as their non-holonomic constraints optimize stability and control during movements like turning and sliding. Practical examples include robotic vacuum cleaners, automated guided vehicles (AGVs) in warehouses, and delivery robots, which rely on non-holonomic models to efficiently plan trajectories respecting their kinematic restrictions.
Control Challenges in Holonomic vs Non-Holonomic Robots
Holonomic robots offer full control over all degrees of freedom, simplifying path planning but increasing complexity in actuator coordination and sensor integration. Non-holonomic robots face constraints on their movements, requiring more advanced control algorithms like feedback linearization to manage underactuated dynamics and avoid slipping or skidding. Balancing precision and stability in non-holonomic systems involves more sophisticated modeling and real-time adjustments compared to the inherently more flexible control of holonomic platforms.
Sensor Integration and Navigation Strategies
Holonomic robots integrate sensors like LIDAR and IMUs for full-dimensional awareness, enabling precise localization and obstacle avoidance in complex environments. Non-holonomic robots rely on sensor fusion techniques combining wheel encoders and gyroscopes to manage constrained motion paths and execute feasible navigation plans. Effective navigation strategies exploit holonomic kinematics for flexible trajectory generation, while non-holonomic systems use model predictive control and path planning adapted to motion restrictions.
Design Considerations for Robotic Systems
Holonomic robotic systems offer greater maneuverability by allowing movement in all degrees of freedom, which simplifies path planning and improves precision in complex environments. Non-holonomic robots, constrained by their motion limitations such as fixed wheel orientations, require more sophisticated control algorithms to navigate confined or dynamic spaces efficiently. Design considerations prioritize task requirements, with holonomic systems favored in applications demanding high agility and non-holonomic systems chosen for stability and energy efficiency in linear motion tasks.
Future Trends in Holonomic and Non-Holonomic Robotics
Future trends in holonomic robotics emphasize the integration of advanced sensor fusion and AI-driven control algorithms for enhanced maneuverability and precision in complex environments. Non-holonomic systems are expected to benefit from improved path planning and adaptive motion control technologies, enabling efficient navigation in constrained spaces. The convergence of these advancements will drive innovations in autonomous vehicles, logistics robots, and service robots with optimized mobility and operational flexibility.
holonomic vs non-holonomic Infographic