ROS provides a flexible, open-source framework for developing and controlling robotic systems with extensive libraries and community support. V-REP, now known as CoppeliaSim, offers a versatile simulation environment that integrates with ROS for realistic robot behavior testing and visualization. Combining ROS with V-REP enhances robot development by enabling seamless code deployment and simulation-based validation.
Table of Comparison
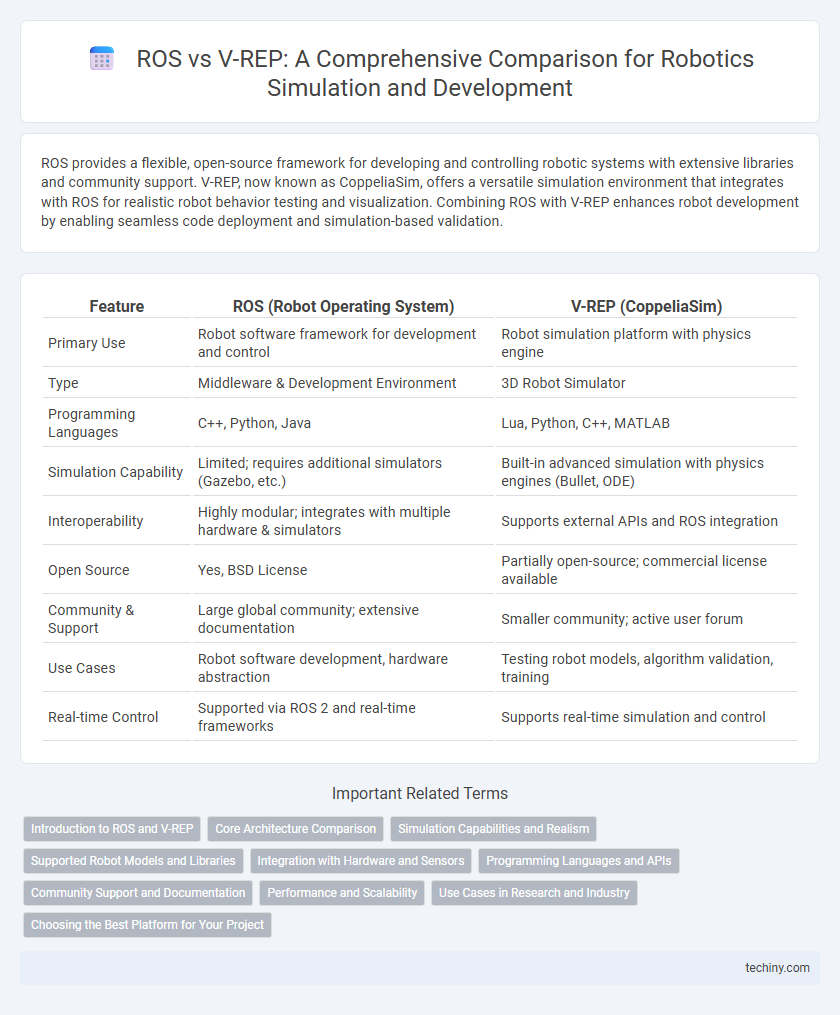
| Feature | ROS (Robot Operating System) | V-REP (CoppeliaSim) |
|---|---|---|
| Primary Use | Robot software framework for development and control | Robot simulation platform with physics engine |
| Type | Middleware & Development Environment | 3D Robot Simulator |
| Programming Languages | C++, Python, Java | Lua, Python, C++, MATLAB |
| Simulation Capability | Limited; requires additional simulators (Gazebo, etc.) | Built-in advanced simulation with physics engines (Bullet, ODE) |
| Interoperability | Highly modular; integrates with multiple hardware & simulators | Supports external APIs and ROS integration |
| Open Source | Yes, BSD License | Partially open-source; commercial license available |
| Community & Support | Large global community; extensive documentation | Smaller community; active user forum |
| Use Cases | Robot software development, hardware abstraction | Testing robot models, algorithm validation, training |
| Real-time Control | Supported via ROS 2 and real-time frameworks | Supports real-time simulation and control |
Introduction to ROS and V-REP
ROS (Robot Operating System) provides a flexible framework for writing robot software, offering tools and libraries that simplify the design, simulation, and control of robotic systems. V-REP, now known as CoppeliaSim, is a versatile robot simulation platform enabling testing and development of robotic algorithms within realistic, physics-based virtual environments. The integration of ROS with V-REP/CoppeliaSim enhances robotic development by combining ROS's communication capabilities with V-REP's advanced simulation features.
Core Architecture Comparison
ROS features a modular, distributed architecture centered around nodes communicating via topics, services, and actions, facilitating real-time data exchange and flexible integration of various sensors and algorithms. V-REP utilizes a centralized simulation engine with integrated physics and kinematic solvers, supporting multiple robot models within a single environment for comprehensive scenario testing. ROS excels in software development and deployment across heterogeneous platforms, while V-REP emphasizes high-fidelity simulation and visualization through its unified interface.
Simulation Capabilities and Realism
ROS offers extensive integration with real-time sensors and hardware interfaces, enabling highly accurate simulation environments tailored for robotic control and autonomy testing. V-REP provides advanced physics engines and a versatile modular architecture that supports complex multi-robot scenarios with realistic dynamics and collision detection. Both platforms excel in simulation realism, but V-REP's built-in distributed control system enhances collaborative robot simulations beyond ROS's typical middleware-focused approach.
Supported Robot Models and Libraries
ROS (Robot Operating System) supports a wide range of robot models through extensive libraries like MoveIt!, Gazebo, and ROS Control, enabling seamless integration with both simulated and real robots across various domains, including ground, aerial, and underwater platforms. V-REP, now known as CoppeliaSim, offers comprehensive built-in models and supports user-defined robots via its flexible API, providing robust simulation capabilities for manipulators, mobile robots, and humanoids. The rich ecosystem of ROS libraries and its hardware abstraction layer enhance adaptability and scalability, whereas V-REP emphasizes high-fidelity simulation with integrated scripting and sensor models for precise testing and development.
Integration with Hardware and Sensors
ROS offers extensive integration capabilities with a wide range of hardware and sensors, supporting numerous drivers and real-time communication protocols that facilitate seamless interaction between robotic components. V-REP provides a versatile simulation environment with built-in support for sensor modeling and hardware interfacing using remote API and middleware, allowing testing of sensor data in virtual scenarios. Combining ROS with V-REP enhances the development pipeline by enabling realistic sensor integration in simulation, which can be directly translated to real-world robotic systems.
Programming Languages and APIs
ROS (Robot Operating System) supports multiple programming languages including Python, C++, and Lisp, offering extensive APIs for sensor integration, robot control, and simulation. V-REP, now known as CoppeliaSim, primarily uses Lua for scripting but also supports remote APIs in languages such as Python, C++, Java, and Matlab, enabling flexible robot simulation and automation. The broad language compatibility and comprehensive APIs in ROS facilitate seamless development and integration, while V-REP's scripting environment provides efficient control over virtual robot models.
Community Support and Documentation
ROS (Robot Operating System) benefits from extensive community support and comprehensive documentation, offering a vast repository of tutorials, forums, and package libraries maintained by global developers. V-REP, now known as CoppeliaSim, features detailed documentation and a dedicated user forum but has a smaller community compared to ROS, limiting the range of shared resources and third-party integrations. Developers seeking robust collaboration and continuous updates typically prefer ROS for its widespread adoption and active online presence.
Performance and Scalability
ROS offers extensive middleware capabilities with modular nodes that support real-time performance in complex robotics applications, enabling scalable system integration across various hardware platforms. V-REP (CoppeliaSim) excels in high-fidelity simulation with efficient physics engines, providing scalable scenarios that facilitate iterative development and multi-robot coordination. While ROS emphasizes distributed control and communication scalability, V-REP focuses on simulating precise robotic mechanisms with performance optimization for large-scale virtual environments.
Use Cases in Research and Industry
ROS excels in robotics research and industry due to its extensive ecosystem, real-time control capabilities, and support for hardware integration, enabling multi-robot coordination and autonomous navigation. V-REP, now replaced by CoppeliaSim, provides advanced 3D simulation with physical modeling, suitable for testing robot kinematics, sensor integration, and algorithm validation in a virtual environment. Combining ROS's communication framework with V-REP's simulation environment facilitates rapid prototyping and comprehensive testing for both academic research and industrial automation projects.
Choosing the Best Platform for Your Project
ROS offers a comprehensive framework with extensive libraries, making it ideal for complex robotic applications requiring real-time control and seamless hardware integration. V-REP, now known as CoppeliaSim, excels in advanced simulation capabilities with a flexible API, supporting rapid prototyping and testing of robotic algorithms. Evaluating project-specific needs such as simulation fidelity, development speed, and hardware compatibility helps determine the best platform for efficient robotic system development.
ROS vs V-REP Infographic