Sensor calibration ensures the accuracy and reliability of individual robotic sensors by correcting systematic errors and aligning measurements with real-world values. Sensor fusion combines data from multiple calibrated sensors to create a comprehensive and more accurate understanding of the robot's environment. Effective sensor fusion relies heavily on precise calibration to minimize discrepancies and enhance decision-making processes in robotic systems.
Table of Comparison
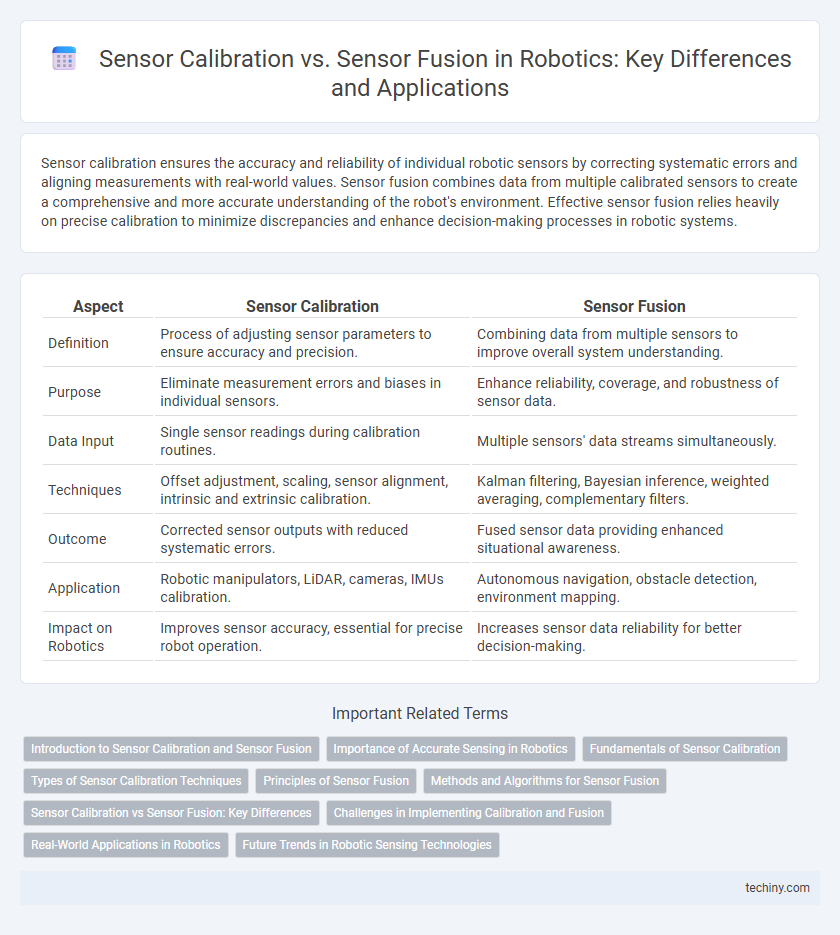
| Aspect | Sensor Calibration | Sensor Fusion |
|---|---|---|
| Definition | Process of adjusting sensor parameters to ensure accuracy and precision. | Combining data from multiple sensors to improve overall system understanding. |
| Purpose | Eliminate measurement errors and biases in individual sensors. | Enhance reliability, coverage, and robustness of sensor data. |
| Data Input | Single sensor readings during calibration routines. | Multiple sensors' data streams simultaneously. |
| Techniques | Offset adjustment, scaling, sensor alignment, intrinsic and extrinsic calibration. | Kalman filtering, Bayesian inference, weighted averaging, complementary filters. |
| Outcome | Corrected sensor outputs with reduced systematic errors. | Fused sensor data providing enhanced situational awareness. |
| Application | Robotic manipulators, LiDAR, cameras, IMUs calibration. | Autonomous navigation, obstacle detection, environment mapping. |
| Impact on Robotics | Improves sensor accuracy, essential for precise robot operation. | Increases sensor data reliability for better decision-making. |
Introduction to Sensor Calibration and Sensor Fusion
Sensor calibration is the process of adjusting and aligning sensor outputs to known standards to ensure accurate and reliable data acquisition in robotics applications. Sensor fusion combines data from multiple calibrated sensors to provide more precise, comprehensive, and robust environmental understanding than individual sensor inputs alone. This integration enhances robotic perception, enabling improved decision-making, navigation, and control in complex environments.
Importance of Accurate Sensing in Robotics
Accurate sensing in robotics hinges on effective sensor calibration and sensor fusion to ensure precise environmental perception and reliable data interpretation. Sensor calibration aligns raw sensor data with real-world measurements, correcting systemic errors, while sensor fusion integrates data from multiple sensors, enhancing robustness and reducing uncertainty. Both processes are critical for enabling autonomous decision-making, improving navigation accuracy, and optimizing robotic performance in dynamic environments.
Fundamentals of Sensor Calibration
Sensor calibration ensures accurate and reliable data by adjusting sensor outputs to match known standards, addressing systematic errors and environmental influences. It involves precise procedures such as offset correction, scale factor adjustment, and noise characterization to enhance sensor performance. Calibration is fundamental for subsequent sensor fusion processes, which combine multiple calibrated sensor inputs to improve overall perception accuracy in robotic systems.
Types of Sensor Calibration Techniques
Sensor calibration techniques are essential for ensuring accurate data in robotics, with common methods including static calibration, dynamic calibration, and self-calibration. Static calibration involves measuring sensor output against known reference values under controlled conditions, while dynamic calibration adjusts sensors during operation using real-time feedback. Advanced methods combine multiple sensor inputs through sensor fusion to improve overall system reliability and precision, enabling robots to navigate and interact effectively in complex environments.
Principles of Sensor Fusion
Sensor fusion integrates data from multiple sensors to enhance accuracy, reliability, and completeness of environmental perception in robotics. The principles of sensor fusion involve data alignment, noise reduction, and uncertainty management to produce a coherent representation from heterogeneous sensor inputs. Effective calibration of individual sensors is crucial to ensure consistent reference frames and improve the fusion process for precise robotic navigation and decision-making.
Methods and Algorithms for Sensor Fusion
Sensor fusion in robotics involves algorithms like Kalman filters, particle filters, and Bayesian networks that combine data from multiple sensors to enhance accuracy and reliability. Sensor calibration ensures each sensor's measurements are precise by correcting systematic errors using techniques such as least squares optimization and machine learning-based error modeling. Effective sensor fusion depends on well-calibrated sensor inputs, allowing algorithms to integrate heterogeneous data for robust environment perception and decision-making.
Sensor Calibration vs Sensor Fusion: Key Differences
Sensor calibration involves adjusting robotic sensors to ensure accurate data by minimizing measurement errors and systematic biases, critical for precise environmental perception. Sensor fusion combines data from multiple calibrated sensors to create a more reliable, comprehensive understanding of the environment, enhancing decision-making and operational efficiency. The key difference lies in calibration ensuring individual sensor accuracy, while fusion integrates diverse sensor inputs for robust and consistent robot performance.
Challenges in Implementing Calibration and Fusion
Sensor calibration faces challenges such as environmental variability, sensor drift, and the need for precise reference measurements to maintain accuracy over time. Sensor fusion encounters complexities in integrating data from heterogeneous sensors with varying noise levels, synchronization issues, and computational constraints affecting real-time performance. Both processes demand robust algorithms and adaptive methods to handle dynamic conditions and ensure reliable robotic perception.
Real-World Applications in Robotics
Sensor calibration ensures accurate data by adjusting measurements to compensate for systematic errors in robotic sensors, critical for precise operations like robotic surgery and autonomous navigation. Sensor fusion integrates data from multiple calibrated sensors to create a comprehensive and reliable perception of the environment, enhancing decision-making in tasks such as drone flight stabilization and industrial automation. Real-world robotics applications depend heavily on both calibrated sensors and advanced sensor fusion algorithms to achieve high performance and safety in dynamic and complex settings.
Future Trends in Robotic Sensing Technologies
Future trends in robotic sensing technologies emphasize advancements in sensor calibration techniques leveraging machine learning for real-time accuracy enhancement and adaptive error correction. Sensor fusion is evolving towards multi-modal data integration using deep neural networks to create robust environmental models that improve autonomous decision-making. Emerging approaches combine precise calibration protocols with sophisticated sensor fusion algorithms to enhance perception reliability and operational efficiency in complex, dynamic environments.
Sensor calibration vs Sensor fusion Infographic