Robotic middleware provides a flexible communication framework that supports interoperability among diverse hardware and software components in robotic systems. Robot Operating System (ROS) builds on this concept by offering a comprehensive open-source platform with tools, libraries, and conventions specifically designed to develop and manage complex robot applications. Unlike generic middleware, ROS integrates standardized messaging, device drivers, and simulation environments, accelerating development and improving modularity in robotics projects.
Table of Comparison
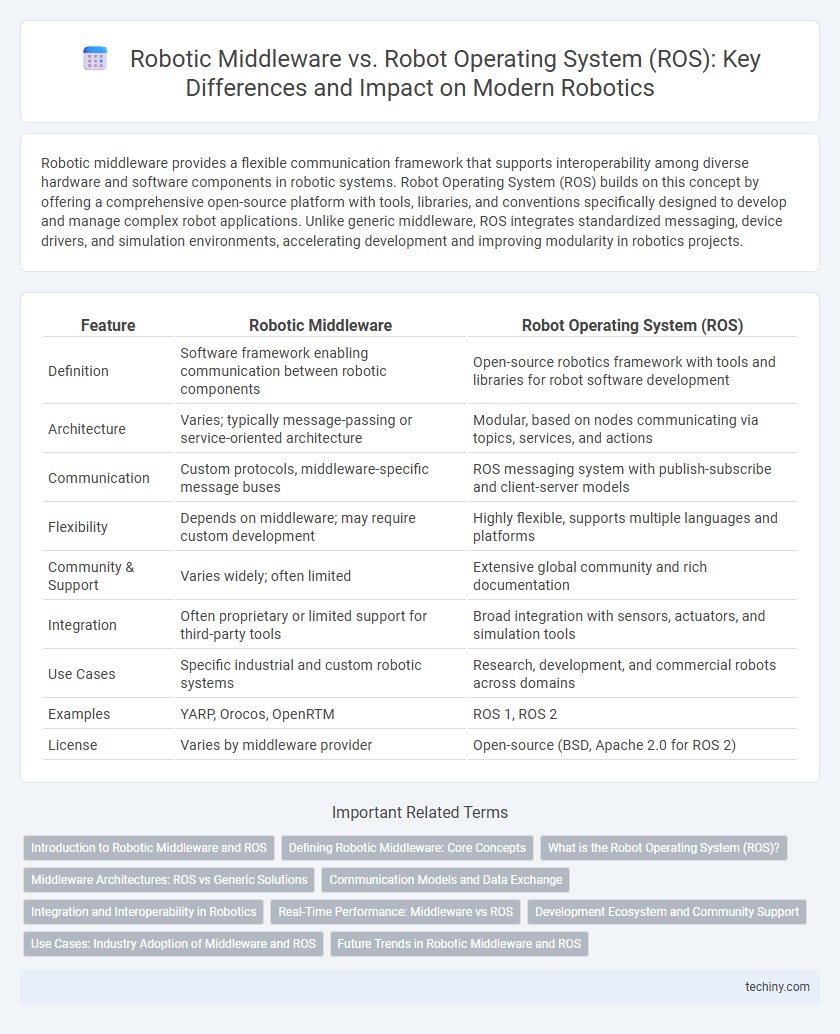
| Feature | Robotic Middleware | Robot Operating System (ROS) |
|---|---|---|
| Definition | Software framework enabling communication between robotic components | Open-source robotics framework with tools and libraries for robot software development |
| Architecture | Varies; typically message-passing or service-oriented architecture | Modular, based on nodes communicating via topics, services, and actions |
| Communication | Custom protocols, middleware-specific message buses | ROS messaging system with publish-subscribe and client-server models |
| Flexibility | Depends on middleware; may require custom development | Highly flexible, supports multiple languages and platforms |
| Community & Support | Varies widely; often limited | Extensive global community and rich documentation |
| Integration | Often proprietary or limited support for third-party tools | Broad integration with sensors, actuators, and simulation tools |
| Use Cases | Specific industrial and custom robotic systems | Research, development, and commercial robots across domains |
| Examples | YARP, Orocos, OpenRTM | ROS 1, ROS 2 |
| License | Varies by middleware provider | Open-source (BSD, Apache 2.0 for ROS 2) |
Introduction to Robotic Middleware and ROS
Robotic middleware serves as a crucial software layer that facilitates communication and integration between diverse robotic components, ensuring seamless data exchange and hardware abstraction. Robot Operating System (ROS) is a widely adopted robotic middleware providing standardized libraries, tools, and protocols that simplify robot software development. By enabling modular design and interoperability, ROS enhances scalability and flexibility in complex robotic systems.
Defining Robotic Middleware: Core Concepts
Robotic middleware serves as the essential communication framework that enables seamless interaction between various hardware components and software applications within a robot, ensuring modularity and interoperability. Unlike traditional middleware, it handles real-time data exchange, synchronization, and hardware abstraction specific to robotic systems. This foundational layer facilitates the integration of sensors, actuators, and control algorithms, streamlining the development and deployment of complex robotic functionalities.
What is the Robot Operating System (ROS)?
The Robot Operating System (ROS) is an open-source framework designed to simplify the development of robotic applications by providing tools, libraries, and conventions for building complex robot behaviors across a variety of platforms. It offers modularity through packages and nodes that enable communication, sensor integration, and actuator control, facilitating interoperability between different hardware and software components. ROS supports simulation, visualization, and debugging tools, making it an essential middleware for robotics researchers and developers aiming to accelerate innovation and deployment.
Middleware Architectures: ROS vs Generic Solutions
Robotic middleware architectures like Robot Operating System (ROS) offer a specialized framework tailored for robot applications, featuring standardized communication protocols, hardware abstraction, and modular software components that expedite development. Generic middleware solutions, such as DDS or MQTT, provide broader communication and data exchange capabilities but often require additional customization to address robotic-specific challenges like real-time control and sensor integration. ROS's ecosystem, with built-in tools and libraries optimized for robotics, facilitates seamless interoperability and scalability, making it a preferred choice for designing complex robotic systems.
Communication Models and Data Exchange
Robotic middleware serves as an abstraction layer facilitating communication between hardware and software components, typically supporting multiple communication models such as publish-subscribe, client-server, and shared memory for flexible data exchange. Robot Operating System (ROS) primarily employs a decentralized publish-subscribe model through topics and a synchronous client-server pattern via services, enabling efficient message passing and real-time data synchronization across distributed nodes. ROS integrates standardized serialization formats like ROS messages and rosbag for logging, ensuring consistent data exchange and interoperability in complex robotic applications.
Integration and Interoperability in Robotics
Robotic middleware provides a standardized framework that enables seamless integration of heterogeneous hardware and software components, facilitating communication across diverse robotic systems. Robot Operating System (ROS) extends this by offering a modular architecture with built-in tools for sensor data fusion, motion planning, and hardware abstraction, enhancing interoperability among various robotic platforms. Both solutions prioritize scalability and real-time data exchange but ROS's open-source ecosystem accelerates development through extensive libraries and community-driven enhancements.
Real-Time Performance: Middleware vs ROS
Robotic middleware often provides better real-time performance compared to Robot Operating System (ROS) due to its lightweight architecture and specialized communication protocols optimized for low latency. ROS, designed for modularity and ease of development, may experience higher latency and less deterministic behavior in time-critical applications. For robotics requiring stringent real-time capabilities, middleware solutions such as Orocos or DDS-based frameworks typically deliver more predictable and consistent execution timing.
Development Ecosystem and Community Support
Robotic middleware provides a modular framework allowing seamless communication between diverse hardware and software components, crucial for developing scalable robotics applications. Robot Operating System (ROS) excels with a comprehensive development ecosystem featuring extensive libraries, tools, and simulation environments, enhancing rapid prototyping and deployment. Its large, active community offers continuous support, frequent updates, and vast open-source resources, positioning ROS as the preferred platform for collaborative robotics innovation.
Use Cases: Industry Adoption of Middleware and ROS
Robotic middleware facilitates seamless integration of heterogeneous robotic components, enabling real-time communication and data exchange crucial for complex industrial automation. Robot Operating System (ROS) is widely adopted in research and prototyping environments, offering extensive libraries and tools that accelerate development cycles in robotics startups and academic institutions. Large-scale manufacturing industries increasingly leverage middleware solutions for robust, scalable deployment and interoperability across diverse robotic platforms on production lines.
Future Trends in Robotic Middleware and ROS
Future trends in robotic middleware and Robot Operating System (ROS) emphasize increased interoperability, real-time data processing, and enhanced scalability to support complex, multi-robot systems. Advancements in ROS 2, including improved DDS-based communication and security protocols, drive more robust and flexible robotic applications across industries. Integration of AI and edge computing within robotic middleware frameworks accelerates autonomous decision-making and adaptive behavior in dynamic environments.
Robotic middleware vs Robot Operating System (ROS) Infographic