Gait generation involves creating stable and efficient walking patterns for robots, optimizing limb movements to adapt to various terrains. Gait transition focuses on smoothly changing from one walking pattern to another, ensuring balance and preventing instability during shifts in speed or direction. Effective coordination between gait generation and transition is crucial for enhancing robotic mobility and adaptability.
Table of Comparison
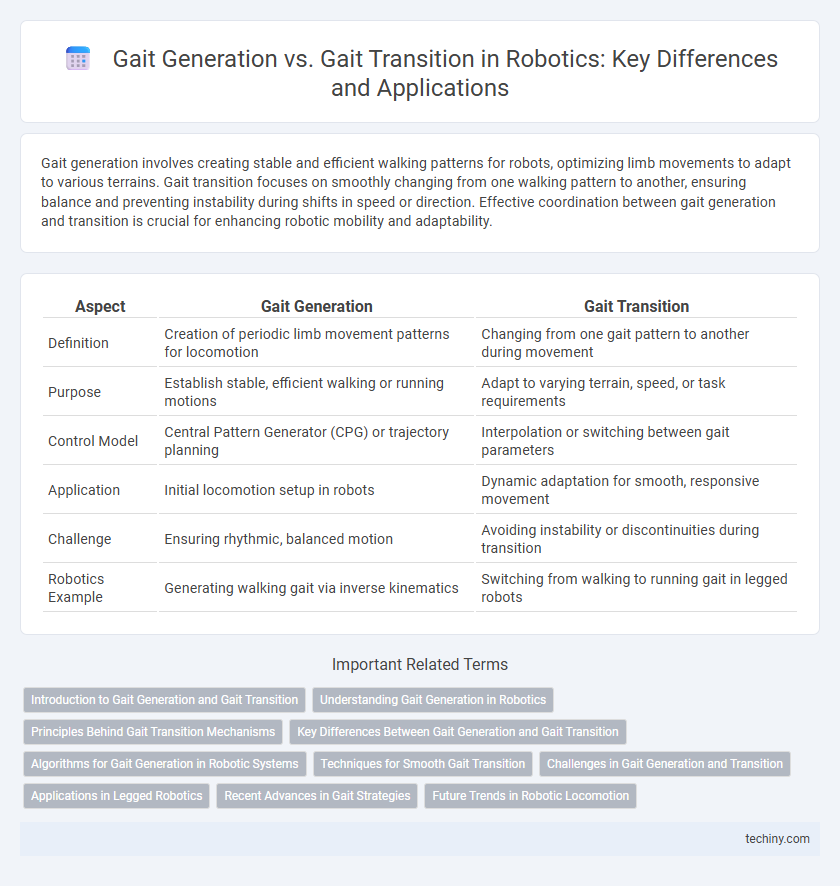
| Aspect | Gait Generation | Gait Transition |
|---|---|---|
| Definition | Creation of periodic limb movement patterns for locomotion | Changing from one gait pattern to another during movement |
| Purpose | Establish stable, efficient walking or running motions | Adapt to varying terrain, speed, or task requirements |
| Control Model | Central Pattern Generator (CPG) or trajectory planning | Interpolation or switching between gait parameters |
| Application | Initial locomotion setup in robots | Dynamic adaptation for smooth, responsive movement |
| Challenge | Ensuring rhythmic, balanced motion | Avoiding instability or discontinuities during transition |
| Robotics Example | Generating walking gait via inverse kinematics | Switching from walking to running gait in legged robots |
Introduction to Gait Generation and Gait Transition
Gait generation involves creating continuous, repeatable motion patterns that enable robots to walk, run, or move efficiently by coordinating limb trajectories and joint angles. Gait transition refers to the process of smoothly shifting between different gait patterns, such as switching from walking to running, to adapt to varying terrains or speeds. Effective control algorithms and sensor feedback systems are crucial for seamless gait generation and transitions, ensuring stability and agility in legged robots.
Understanding Gait Generation in Robotics
Gait generation in robotics involves creating precise, rhythmic movement patterns that enable robots to walk or run effectively, optimizing stability and energy efficiency. This process relies heavily on algorithms that coordinate limb trajectories and force distribution, ensuring adaptive responses to different terrains. Unlike gait transition, which focuses on switching between movement types, gait generation centers on producing continuous, stable locomotion tailored to specific robotic designs.
Principles Behind Gait Transition Mechanisms
Gait transition mechanisms in robotics are governed by principles that optimize stability, energy efficiency, and adaptability to varying terrains and speeds. These mechanisms rely on sensory feedback loops and predictive models to alter limb coordination patterns dynamically, ensuring smooth shifts between walking, trotting, or running gaits. Understanding the underlying neural-inspired control algorithms enables the development of robots capable of fluid and context-aware locomotion adjustments.
Key Differences Between Gait Generation and Gait Transition
Gait generation involves creating specific movement patterns for robots to achieve stable and efficient locomotion, often based on predefined algorithms or models. Gait transition refers to the process of smoothly shifting between different gaits to adapt to varying terrains or tasks, requiring real-time control and sensor feedback integration. The key difference lies in gait generation focusing on producing stable patterns, while gait transition emphasizes adaptability and responsiveness in robotic movement.
Algorithms for Gait Generation in Robotic Systems
Algorithms for gait generation in robotic systems focus on producing stable and efficient locomotion patterns by modeling leg movements and joint coordination. Techniques such as Central Pattern Generators (CPGs), optimization-based methods, and machine learning enable robots to generate rhythmic and adaptable gaits tailored to diverse terrains and tasks. These algorithms emphasize continuous and smooth gait cycles, distinguishing them from gait transition algorithms that manage changes between distinct locomotion modes.
Techniques for Smooth Gait Transition
Techniques for smooth gait transition in robotics focus on minimizing dynamic instability and maintaining momentum during shifts from one gait to another. Methods such as trajectory interpolation, phase-based modulation, and adaptive control algorithms enable robots to adjust foot placement and joint angles seamlessly. Incorporating sensor feedback and machine learning models further enhances real-time adaptation, ensuring fluid and energy-efficient motion transitions.
Challenges in Gait Generation and Transition
Gait generation in robotics involves creating stable and efficient movement patterns, with challenges including maintaining balance, adapting to varying terrains, and optimizing energy consumption. Gait transition poses difficulties in smoothly switching between different locomotion modes, requiring precise timing and coordination to prevent instability or falls. Both processes demand advanced control algorithms and sensory feedback integration to ensure seamless and reliable robotic mobility.
Applications in Legged Robotics
Gait generation in legged robotics involves creating stable and efficient movement patterns for different terrains, optimizing energy consumption and speed. Gait transition focuses on smoothly switching between distinct gaits, such as walking to running or climbing, to adapt to changing environmental conditions or task demands. Effective implementation of both gait generation and gait transition improves robot agility, stability, and versatility in real-world applications like search and rescue, exploration, and industrial automation.
Recent Advances in Gait Strategies
Recent advances in gait strategies for robotics emphasize adaptive gait generation algorithms capable of real-time modifications based on terrain feedback, enhancing stability and energy efficiency. Gait transition techniques have evolved with machine learning integration, enabling smooth switching between walking, running, and climbing modes in legged robots. These improvements optimize locomotion in complex environments, advancing autonomous navigation and robotic versatility.
Future Trends in Robotic Locomotion
Gait generation involves creating stable and efficient movement patterns for robots, while gait transition focuses on the seamless switch between these patterns to adapt to varying terrains and tasks. Future trends in robotic locomotion emphasize adaptive algorithms powered by machine learning and real-time sensory feedback to optimize both gait generation and transition. Integration of neuromorphic computing and bio-inspired models promises to enhance agility and energy efficiency in next-generation robots.
Gait generation vs Gait transition Infographic