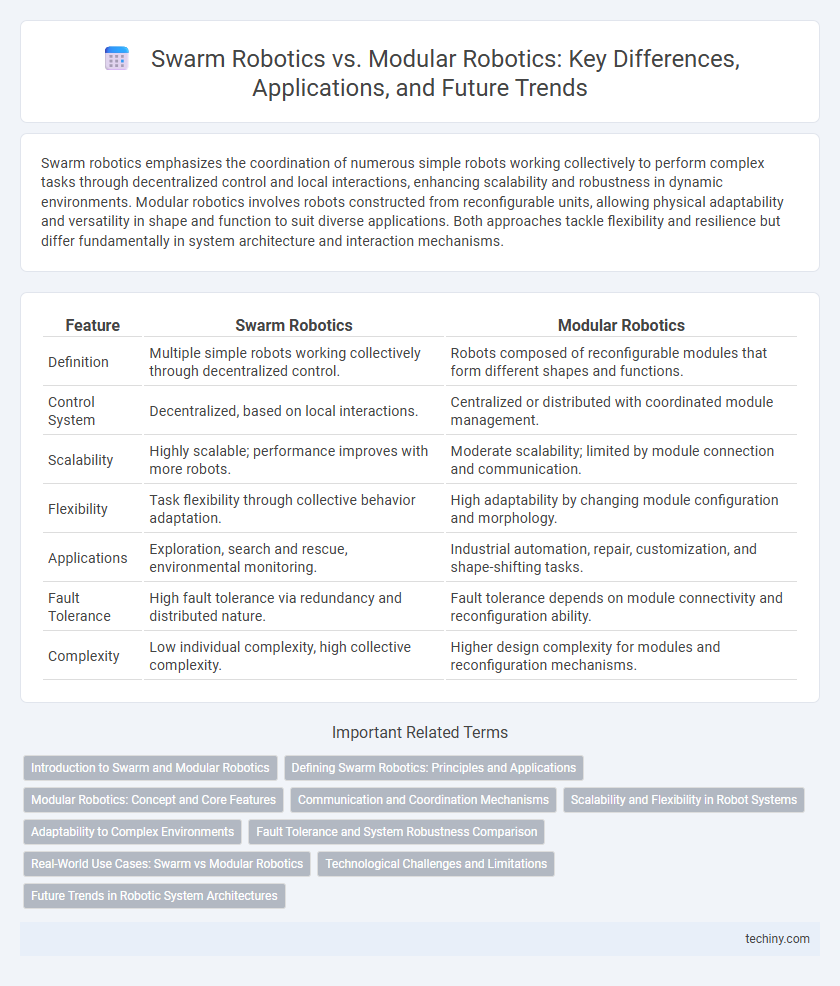
Swarm robotics emphasizes the coordination of numerous simple robots working collectively to perform complex tasks through decentralized control and local interactions, enhancing scalability and robustness in dynamic environments. Modular robotics involves robots constructed from reconfigurable units, allowing physical adaptability and versatility in shape and function to suit diverse applications. Both approaches tackle flexibility and resilience but differ fundamentally in system architecture and interaction mechanisms.
Table of Comparison
| Feature | Swarm Robotics | Modular Robotics |
|---|---|---|
| Definition | Multiple simple robots working collectively through decentralized control. | Robots composed of reconfigurable modules that form different shapes and functions. |
| Control System | Decentralized, based on local interactions. | Centralized or distributed with coordinated module management. |
| Scalability | Highly scalable; performance improves with more robots. | Moderate scalability; limited by module connection and communication. |
| Flexibility | Task flexibility through collective behavior adaptation. | High adaptability by changing module configuration and morphology. |
| Applications | Exploration, search and rescue, environmental monitoring. | Industrial automation, repair, customization, and shape-shifting tasks. |
| Fault Tolerance | High fault tolerance via redundancy and distributed nature. | Fault tolerance depends on module connectivity and reconfiguration ability. |
| Complexity | Low individual complexity, high collective complexity. | Higher design complexity for modules and reconfiguration mechanisms. |
Introduction to Swarm and Modular Robotics
Swarm robotics involves the coordination of large numbers of simple, autonomous robots that work collectively to perform complex tasks through decentralized control and local communication. Modular robotics consists of reconfigurable robot units that can dynamically change their shape and functionality by physically connecting and disconnecting to adapt to different tasks. Both approaches emphasize flexibility and robustness, with swarm robotics focusing on emergent behavior from many interactions, while modular robotics prioritizes structural adaptability.
Defining Swarm Robotics: Principles and Applications
Swarm robotics is a field inspired by the collective behavior of social insects, emphasizing decentralized control and simple individual agents working together to perform complex tasks. Principles include scalability, flexibility, and robustness, enabling applications such as environmental monitoring, search and rescue, and agricultural automation. These multi-robot systems rely on local communication and cooperation to achieve global objectives without centralized coordination.
Modular Robotics: Concept and Core Features
Modular robotics involves creating robotic systems from multiple, interchangeable units that can reconfigure themselves to perform diverse tasks, enhancing adaptability and fault tolerance. Core features include decentralized control, scalability, and self-repair capabilities, allowing modules to autonomously connect, disconnect, and reorganize without human intervention. This approach enables efficient customization for complex environments, optimizing performance in exploration, manufacturing, and search-and-rescue operations.
Communication and Coordination Mechanisms
Swarm robotics relies on decentralized communication strategies, primarily using local interactions and simple signaling methods to achieve robust coordination among numerous robots. Modular robotics employs more structured communication protocols, enabling precise coordination through physical connections and centralized or hierarchical control mechanisms. The differentiation in communication frameworks directly influences their adaptability, scalability, and task execution efficiency in complex environments.
Scalability and Flexibility in Robot Systems
Swarm robotics excels in scalability by utilizing large numbers of simple robots that coordinate through decentralized algorithms, allowing systems to grow dynamically while maintaining robustness. Modular robotics offers superior flexibility by enabling reconfiguration of individual units into diverse shapes and functionalities, adapting to various tasks and environments. Combining swarm scalability with modular adaptability enhances robot system performance in complex, evolving applications.
Adaptability to Complex Environments
Swarm robotics excels in adaptability to complex environments through decentralized control, enabling individual robots to collectively respond to dynamic changes and obstacles. Modular robotics offers high adaptability by reconfiguring physical structures to suit specific tasks or environments, providing versatility in shape and function. Both approaches leverage distributed intelligence, but swarm robotics prioritizes collective behavior while modular robotics emphasizes physical reconfiguration for environmental challenges.
Fault Tolerance and System Robustness Comparison
Swarm robotics demonstrates high fault tolerance through decentralized coordination, allowing individual robots to fail without compromising the overall system performance. Modular robotics enhances system robustness by enabling reconfiguration and self-repair through interchangeable modules, reducing downtime caused by mechanical failures. Both approaches improve reliability, but swarm robotics excels in scalability and redundancy, while modular robotics offers greater adaptability in hardware fault recovery.
Real-World Use Cases: Swarm vs Modular Robotics
Swarm robotics excels in applications like environmental monitoring and agriculture, where numerous small robots coordinate to cover large areas efficiently. Modular robotics shines in adaptable manufacturing and space exploration, offering reconfigurable robots that can change shape and function for diverse tasks. Both approaches enhance automation but target distinct real-world challenges through collective behavior or structural versatility.
Technological Challenges and Limitations
Swarm robotics faces significant challenges in coordinating decentralized units to achieve complex tasks without centralized control, leading to difficulties in communication reliability and collective decision-making under dynamic conditions. Modular robotics encounters limitations related to physical reconfiguration speed, mechanical connection robustness, and energy efficiency during transformation processes. Both technologies struggle with scalability, fault tolerance, and seamless integration of heterogeneous components in real-world environments.
Future Trends in Robotic System Architectures
Future trends in robotic system architectures emphasize increased adaptability and scalability, with swarm robotics leveraging decentralized coordination to enhance collective problem-solving and robustness in dynamic environments. Modular robotics focus on reconfigurable hardware units that enable versatile functionality and self-repair capabilities, promoting long-term sustainability and customization in complex tasks. Advances in AI and sensor integration are driving seamless collaboration between swarm and modular systems, pushing the boundaries of autonomous operation and intelligent swarm-morphing structures.
Swarm robotics vs Modular robotics Infographic