Differential drive robots use two independently driven wheels to maneuver, offering simplicity and precise control for forward and rotational movements but limited lateral mobility. Omnidirectional drive systems incorporate additional wheels or specialized wheel designs, enabling movement in any direction without changing the robot's orientation for greater flexibility and improved navigation in tight spaces. Choosing between differential and omnidirectional drives depends on application requirements, with differential drives favored for cost-effective, straightforward tasks and omnidirectional drives excelling in complex, dynamic environments.
Table of Comparison
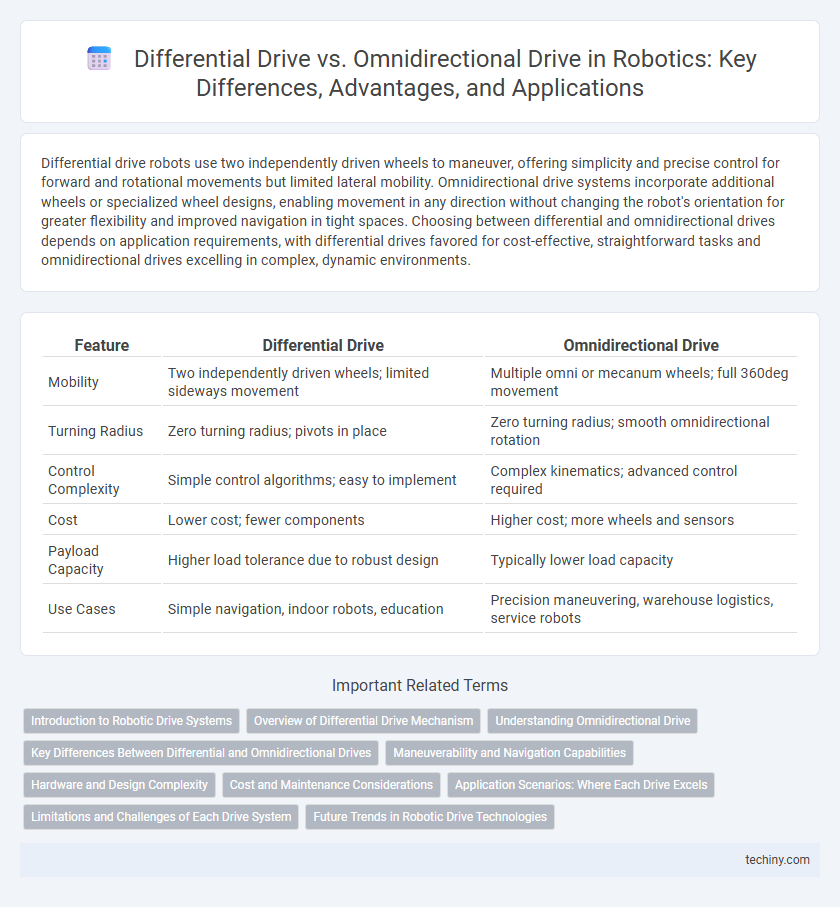
| Feature | Differential Drive | Omnidirectional Drive |
|---|---|---|
| Mobility | Two independently driven wheels; limited sideways movement | Multiple omni or mecanum wheels; full 360deg movement |
| Turning Radius | Zero turning radius; pivots in place | Zero turning radius; smooth omnidirectional rotation |
| Control Complexity | Simple control algorithms; easy to implement | Complex kinematics; advanced control required |
| Cost | Lower cost; fewer components | Higher cost; more wheels and sensors |
| Payload Capacity | Higher load tolerance due to robust design | Typically lower load capacity |
| Use Cases | Simple navigation, indoor robots, education | Precision maneuvering, warehouse logistics, service robots |
Introduction to Robotic Drive Systems
Differential drive systems use two independently driven wheels on a common axis, allowing for straightforward, precise control and simple mechanical design ideal for mobile robots navigating flat surfaces. Omnidirectional drive systems employ multiple wheels, such as mecanum or omni wheels, enabling robots to move in any direction without changing orientation, crucial for complex maneuvering in constrained environments. Choosing between differential and omnidirectional drives depends on factors like required mobility, complexity, and the operational environment in robotic applications.
Overview of Differential Drive Mechanism
The differential drive mechanism in robotics consists of two independently driven wheels on either side of the robot, allowing precise control of direction and speed through varying wheel velocities. This system provides efficient maneuverability on flat surfaces and simplifies hardware design by requiring fewer actuators compared to omnidirectional drives. Differential drive robots typically execute smooth turns by rotating wheels at different rates, making them ideal for tasks involving straightforward navigation and obstacle avoidance.
Understanding Omnidirectional Drive
Omnidirectional drive systems enable robots to move seamlessly in any direction without changing orientation, using specialized wheels such as mecanum or omni wheels. This capability provides superior maneuverability compared to differential drive robots, which rely on two independently controlled wheels and are limited to forward, backward, and differential turning motions. Advanced motion control algorithms and precise wheel speed coordination in omnidirectional drives facilitate smooth lateral, diagonal, and rotational movements, enhancing navigation in complex environments.
Key Differences Between Differential and Omnidirectional Drives
Differential drive robots use two independently driven wheels on either side, enabling simple and effective two-wheel steering but limiting lateral movement and requiring complex maneuvers for sideways motion. Omnidirectional drive systems incorporate multiple wheels with independent motors, such as mecanum or omni wheels, allowing movement in any direction without changing orientation, enhancing maneuverability in confined spaces. The choice between differential and omnidirectional drives depends on the application's need for maneuverability, complexity, and control precision in robotics navigation.
Maneuverability and Navigation Capabilities
Differential drive robots excel in simple, straightforward navigation with efficient control over rotation and linear movement but face limitations in complex maneuvering due to their restricted turning radius. Omnidirectional drive robots offer superior maneuverability, enabling seamless lateral and diagonal movements without reorientation, which enhances navigation in tight, dynamic environments. This capability allows omnidirectional systems to execute precise positioning and smooth trajectory adjustments, critical for tasks requiring agility and rapid directional changes.
Hardware and Design Complexity
Differential drive robots use two independent wheels on either side, resulting in simpler hardware with fewer actuators and straightforward control algorithms. Omnidirectional drive systems employ multiple wheels, such as mecanum or omni wheels, requiring complex hardware configurations and sophisticated control methods to achieve multidirectional movement. The design complexity of omnidirectional platforms increases due to the need for precise wheel alignment and advanced kinematics, impacting both development time and cost.
Cost and Maintenance Considerations
Differential drive robots typically incur lower initial costs due to simpler mechanical design and fewer components, making them cost-effective for basic navigation tasks. Maintenance demands for differential drives are reduced because of fewer moving parts and straightforward wheel alignment compared to omnidirectional systems. Omnidirectional drives, while offering superior maneuverability, require more complex hardware such as additional wheels and sophisticated control algorithms, leading to higher expenses and increased maintenance frequency.
Application Scenarios: Where Each Drive Excels
Differential drive systems excel in applications requiring straightforward navigation and simple control, such as warehouse robots and basic mobile platforms where cost-effectiveness and durability are critical. Omnidirectional drives are ideal for environments demanding high maneuverability and precise movement, including assembly lines and service robots operating in confined or dynamic spaces. The choice depends on task complexity, with differential drives favoring linear paths and omnidirectional drives enabling lateral and rotational movements simultaneously.
Limitations and Challenges of Each Drive System
Differential drive systems face challenges in maneuverability due to their inability to move laterally, limiting their effectiveness in tight or complex environments. Omnidirectional drive systems, while offering superior mobility with lateral movement capabilities, encounter limitations in mechanical complexity, higher cost, and increased maintenance requirements. Both drive types must carefully consider trade-offs between simplicity, control algorithms, and operational environments to optimize robotic performance.
Future Trends in Robotic Drive Technologies
Future trends in robotic drive technologies emphasize the integration of advanced sensor fusion and AI-driven control algorithms to enhance differential drive efficiency and maneuverability in complex environments. Omnidirectional drives are evolving with adaptive wheel surface materials and modular actuator designs, enabling seamless navigation on diverse terrains and improved energy efficiency. Innovations in lightweight materials and power management systems are set to revolutionize both drive types, promoting more versatile, autonomous robots across industrial and service applications.
differential drive vs omnidirectional drive Infographic