Forward kinematics involves calculating the position and orientation of a robot's end-effector based on known joint parameters, enabling precise control in robotic arms and manipulators. Inverse kinematics, conversely, determines the required joint angles to achieve a desired end-effector pose, posing complex challenges due to multiple possible solutions or no solution in constrained environments. Efficient algorithms for both forward and inverse kinematics are crucial for real-time robotic motion planning and control in applications ranging from industrial automation to autonomous navigation.
Table of Comparison
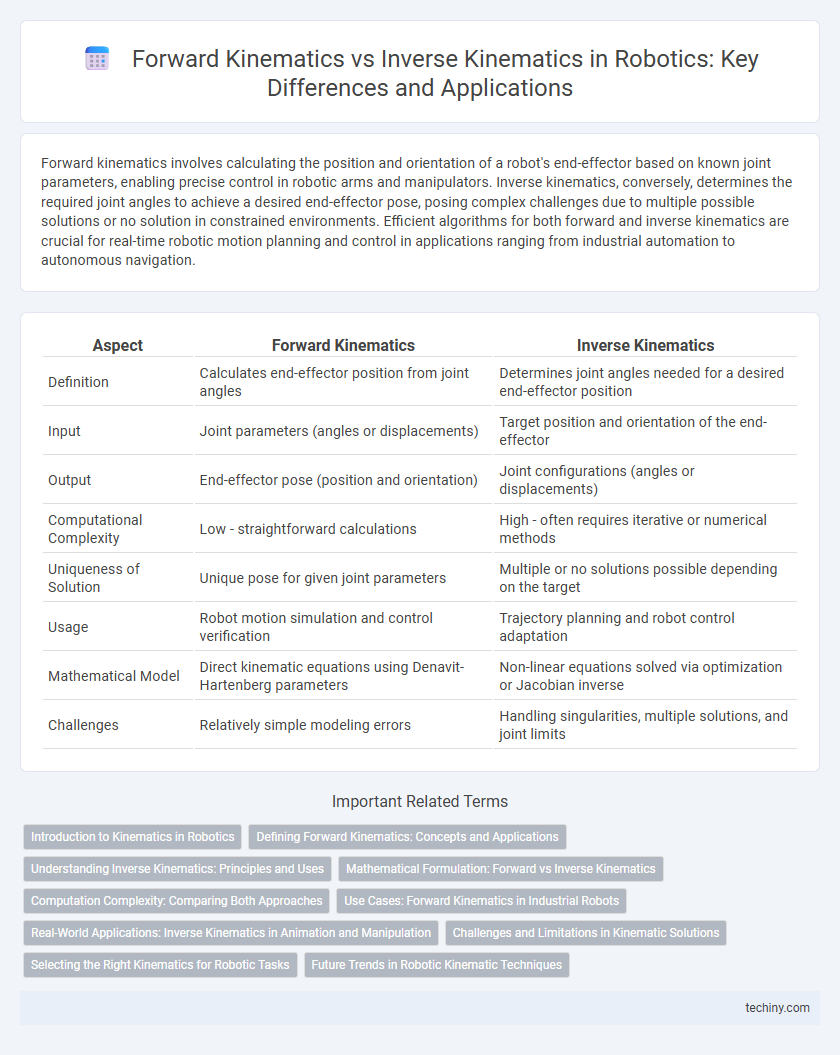
| Aspect | Forward Kinematics | Inverse Kinematics |
|---|---|---|
| Definition | Calculates end-effector position from joint angles | Determines joint angles needed for a desired end-effector position |
| Input | Joint parameters (angles or displacements) | Target position and orientation of the end-effector |
| Output | End-effector pose (position and orientation) | Joint configurations (angles or displacements) |
| Computational Complexity | Low - straightforward calculations | High - often requires iterative or numerical methods |
| Uniqueness of Solution | Unique pose for given joint parameters | Multiple or no solutions possible depending on the target |
| Usage | Robot motion simulation and control verification | Trajectory planning and robot control adaptation |
| Mathematical Model | Direct kinematic equations using Denavit-Hartenberg parameters | Non-linear equations solved via optimization or Jacobian inverse |
| Challenges | Relatively simple modeling errors | Handling singularities, multiple solutions, and joint limits |
Introduction to Kinematics in Robotics
Forward kinematics in robotics involves calculating the robot's end-effector position and orientation based on given joint parameters, providing a direct and computationally efficient solution. Inverse kinematics, by contrast, determines the required joint angles to achieve a desired end-effector pose, often involving complex, iterative algorithms due to nonlinear equations and multiple possible solutions. Both techniques form the foundation of robotic motion planning, enabling precise control of manipulators in tasks such as assembly, welding, and autonomous navigation.
Defining Forward Kinematics: Concepts and Applications
Forward kinematics involves calculating the position and orientation of a robot's end-effector based on known joint parameters such as angles and displacements. This process uses the robot's kinematic equations to map joint variables directly to Cartesian coordinates in the workspace. Forward kinematics is essential in robotic path planning, control, and simulation for predicting the spatial configuration of robotic arms.
Understanding Inverse Kinematics: Principles and Uses
Inverse kinematics involves calculating the joint parameters needed to place a robot's end effector at a desired position and orientation, making it essential for precise robot control and path planning. Unlike forward kinematics, which determines the end effector's pose based on given joint angles, inverse kinematics solves complex nonlinear equations often requiring numerical methods or optimization algorithms for practical implementation. This principle is crucial in applications such as robotic manipulation, animation, and autonomous navigation, where accurate positioning is mandatory.
Mathematical Formulation: Forward vs Inverse Kinematics
Forward kinematics uses known joint parameters to calculate the position and orientation of the robot's end effector by applying transformation matrices and coordinate frame rotations. Inverse kinematics involves solving nonlinear equations that determine joint angles from a desired end effector position, often requiring iterative numerical methods or closed-form solutions for manipulators. The mathematical complexity of inverse kinematics is significantly higher due to multiple potential solutions and singularities in the robot's workspace.
Computation Complexity: Comparing Both Approaches
Forward kinematics involves straightforward computation of end-effector positions from known joint parameters, making it computationally less intensive and suitable for real-time control. Inverse kinematics requires solving nonlinear equations to determine joint parameters from desired end-effector positions, resulting in higher computational complexity due to multiple possible solutions and constraints. Optimization algorithms or numerical methods, such as Jacobian-based approaches, are often necessary to handle the complexity and achieve feasible solutions in inverse kinematics.
Use Cases: Forward Kinematics in Industrial Robots
Forward kinematics is primarily used in industrial robots for precise control of end-effector positioning based on known joint parameters, enabling tasks such as assembly, welding, and pick-and-place operations. It facilitates path planning and real-time monitoring by calculating the exact position and orientation of the robot's tool in Cartesian space. This method is especially effective in environments with repetitive tasks requiring high accuracy and consistency.
Real-World Applications: Inverse Kinematics in Animation and Manipulation
Inverse kinematics allows animators and roboticists to calculate joint parameters needed for end-effectors to reach desired positions, enhancing realistic character movements and precise robotic manipulation. Its real-world applications include animation rigs that produce lifelike gestures and industrial robots that adapt to dynamic tasks with accuracy. Forward kinematics, in contrast, computes end-effector positions from given joint angles but lacks the adaptability crucial for responsive manipulation and interactive animation.
Challenges and Limitations in Kinematic Solutions
Forward kinematics involves calculating the end-effector position from given joint parameters, offering straightforward computation but limited adaptability in complex task planning. Inverse kinematics presents challenges such as multiple or no solutions, singularities, and computational intensity when determining joint angles from desired end-effector positions. Both methods face limitations in handling real-world constraints like joint limits, obstacle avoidance, and dynamic environments, necessitating advanced algorithms for effective motion planning in robotics.
Selecting the Right Kinematics for Robotic Tasks
Forward kinematics calculates the end-effector position based on joint parameters, providing a direct solution ideal for trajectory planning and control of robotic arms. Inverse kinematics solves for joint parameters needed to reach a desired end-effector position, crucial for tasks requiring precision and adaptability in complex environments. Selecting the right kinematics depends on task requirements like accuracy, computational efficiency, and workspace constraints to optimize robotic performance.
Future Trends in Robotic Kinematic Techniques
Emerging trends in robotic kinematic techniques emphasize integrating machine learning algorithms with forward and inverse kinematics to enhance real-time adaptability in complex environments. Advances in sensor fusion and computational power enable more precise prediction and control of robotic limb trajectories, improving accuracy and efficiency in dynamic tasks. Future developments aim to create hybrid models combining data-driven and analytical methods to overcome current limitations in kinematic calculations and achieve seamless human-robot interaction.
forward kinematics vs inverse kinematics Infographic