Joint space planning focuses on controlling a robot's individual joint angles to achieve desired movements, ensuring smooth trajectories within mechanical constraints. Task space planning, on the other hand, concentrates on the robot's end-effector position and orientation in Cartesian space, directly addressing the execution of specific tasks. Selecting between joint space and task space planning depends on the complexity of the task and the precision required for end-effector placement.
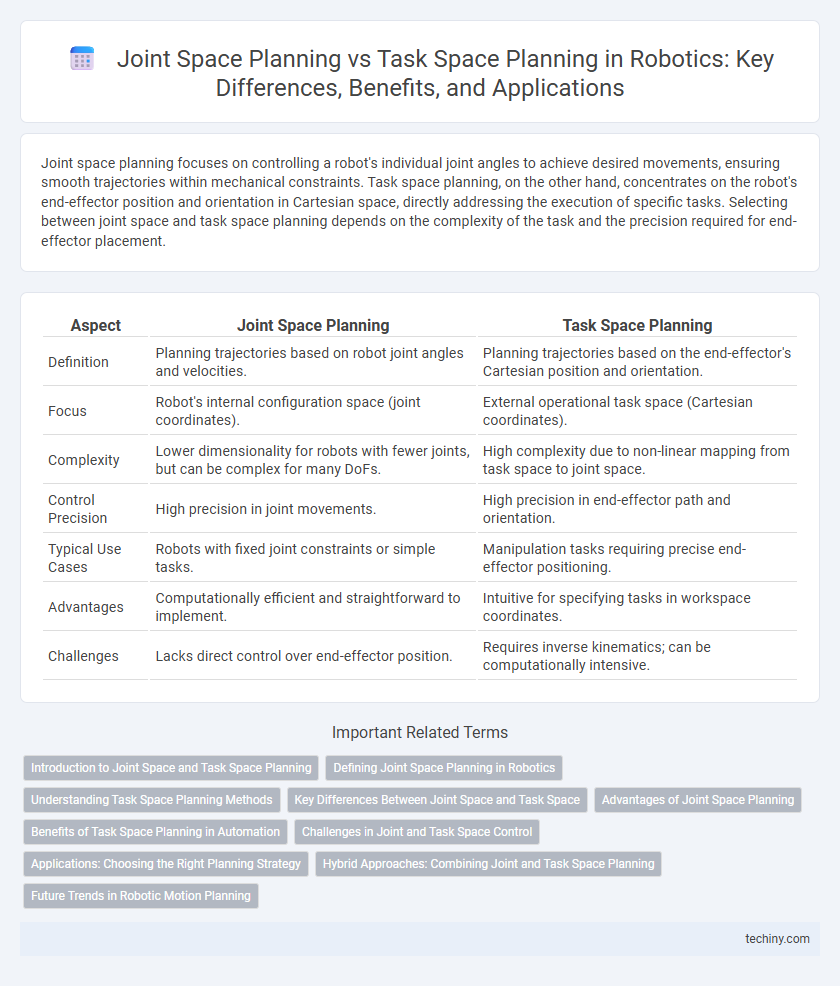
Table of Comparison
| Aspect | Joint Space Planning | Task Space Planning |
|---|---|---|
| Definition | Planning trajectories based on robot joint angles and velocities. | Planning trajectories based on the end-effector's Cartesian position and orientation. |
| Focus | Robot's internal configuration space (joint coordinates). | External operational task space (Cartesian coordinates). |
| Complexity | Lower dimensionality for robots with fewer joints, but can be complex for many DoFs. | High complexity due to non-linear mapping from task space to joint space. |
| Control Precision | High precision in joint movements. | High precision in end-effector path and orientation. |
| Typical Use Cases | Robots with fixed joint constraints or simple tasks. | Manipulation tasks requiring precise end-effector positioning. |
| Advantages | Computationally efficient and straightforward to implement. | Intuitive for specifying tasks in workspace coordinates. |
| Challenges | Lacks direct control over end-effector position. | Requires inverse kinematics; can be computationally intensive. |
Introduction to Joint Space and Task Space Planning
Joint space planning involves calculating robot movements by directly controlling individual joint angles, optimizing trajectories within the robot's kinematic chain. Task space planning focuses on end-effector positioning and orientation, ensuring precise interaction with the environment through spatial coordinates and orientation parameters. Understanding both planning methods is crucial for designing efficient robotic motion systems that balance accuracy and computational complexity.
Defining Joint Space Planning in Robotics
Joint space planning in robotics involves generating motion trajectories by directly manipulating a robot's joint parameters, such as angles and velocities, within its configuration space. This approach ensures precise control of each joint's movement, optimizing for constraints like joint limits and avoiding collisions in the robot's mechanical structure. Compared to task space planning, joint space planning emphasizes kinematic feasibility and smooth joint transitions, crucial for robotic manipulators performing complex motions.
Understanding Task Space Planning Methods
Task space planning methods focus on defining robot movements based on end-effector positions and orientations within the operational environment, ensuring precise trajectory control for specific tasks. These methods utilize spatial coordinates and orientation parameters to directly guide the robot along desired paths, improving accuracy in manipulation and interaction. By leveraging kinematic models, task space planning enhances flexibility and adaptability in dynamic, unstructured environments, outperforming joint space planning in task-specific applications.
Key Differences Between Joint Space and Task Space
Joint space planning involves calculating robot movements based on the angles and positions of individual joints, optimizing motion within the robot's configuration space for precise control and collision avoidance. Task space planning focuses on the end-effector's trajectory and position, emphasizing the robot's interaction with the environment and task execution efficiency. The key difference lies in joint space targeting internal mechanical parameters, while task space targets external spatial goals and operational context.
Advantages of Joint Space Planning
Joint space planning enables precise control of each robotic joint, allowing for smoother and more predictable motion trajectories that reduce mechanical stress and wear. It simplifies collision avoidance and kinematic constraints handling by operating directly within the robot's degrees of freedom, leading to faster computation times compared to task space planning. This approach enhances the accuracy of inverse kinematics solutions and improves overall system stability in complex manipulation tasks.
Benefits of Task Space Planning in Automation
Task space planning enhances automation by directly controlling the robot's end-effector movements, enabling precise execution of complex tasks in dynamic environments. It simplifies the handling of constraints related to the workspace, improving adaptability and operational efficiency. This approach reduces computational load and increases the robustness of motion trajectories compared to joint space planning.
Challenges in Joint and Task Space Control
Joint space planning requires precise control of each robot joint's angle, which can lead to complex inverse kinematics and singularity issues affecting smooth motion. Task space planning focuses on the robot's end-effector trajectory, demanding accurate mapping between operational space and joint configurations, often resulting in computational challenges and sensitivity to model inaccuracies. Both control strategies must address dynamic constraints, real-time responsiveness, and collision avoidance to ensure safe and efficient robotic operation.
Applications: Choosing the Right Planning Strategy
Joint space planning excels in applications requiring precise control of robotic arm configurations, such as industrial assembly and welding, where joint angles must be carefully coordinated to avoid collisions. Task space planning is ideal for end-effector-centric tasks like pick-and-place operations or surgical robotics, emphasizing the position and orientation of the tool in the environment. Selecting the appropriate strategy depends on the complexity of the workspace, desired precision, and the specific objectives of the robotic task.
Hybrid Approaches: Combining Joint and Task Space Planning
Hybrid approaches in robotics combine joint space and task space planning to leverage the precision of joint control with the adaptability of task-oriented objectives. These methods optimize robot trajectories by integrating kinematic constraints at the joint level while simultaneously considering end-effector goals in Cartesian space. This fusion enhances motion efficiency, collision avoidance, and real-time adaptability in complex environments.
Future Trends in Robotic Motion Planning
Future trends in robotic motion planning emphasize the integration of joint space and task space planning through hybrid approaches, enabling robots to efficiently navigate complex environments with higher precision and adaptability. Advances in machine learning and real-time sensor feedback are driving the development of algorithms that optimize motion trajectories while ensuring collision avoidance and dynamic responsiveness. Enhanced computational power and AI-powered predictive models are expected to transform motion planning by enabling proactive adjustments and autonomous decision-making in diverse industrial and service robotics applications.
Joint space planning vs task space planning Infographic