Teleoperation in robotics relies on human operators remotely controlling robots, offering precise and adaptable responses in complex environments. Autonomous navigation uses advanced sensors and algorithms to enable robots to independently perceive surroundings and make decisions without human intervention. While teleoperation ensures human judgment in unpredictable scenarios, autonomous navigation enhances efficiency and scalability in repetitive or well-mapped tasks.
Table of Comparison
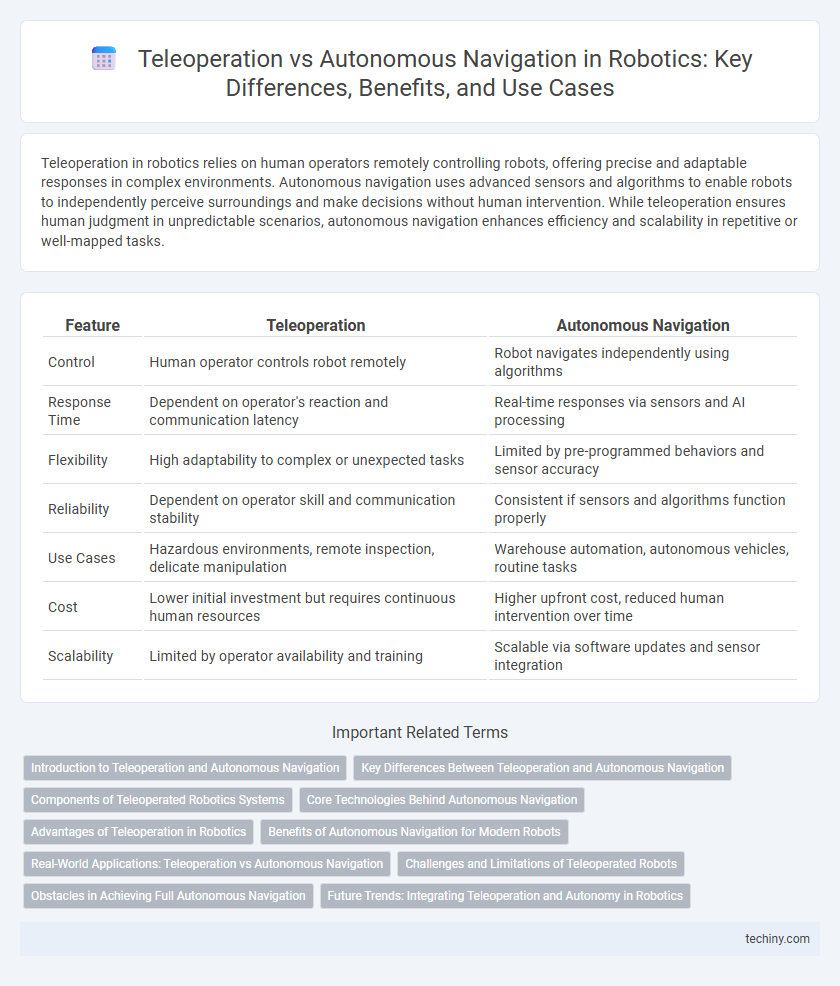
| Feature | Teleoperation | Autonomous Navigation |
|---|---|---|
| Control | Human operator controls robot remotely | Robot navigates independently using algorithms |
| Response Time | Dependent on operator's reaction and communication latency | Real-time responses via sensors and AI processing |
| Flexibility | High adaptability to complex or unexpected tasks | Limited by pre-programmed behaviors and sensor accuracy |
| Reliability | Dependent on operator skill and communication stability | Consistent if sensors and algorithms function properly |
| Use Cases | Hazardous environments, remote inspection, delicate manipulation | Warehouse automation, autonomous vehicles, routine tasks |
| Cost | Lower initial investment but requires continuous human resources | Higher upfront cost, reduced human intervention over time |
| Scalability | Limited by operator availability and training | Scalable via software updates and sensor integration |
Introduction to Teleoperation and Autonomous Navigation
Teleoperation enables operators to remotely control robots using real-time inputs, offering precise maneuvering in complex environments where human judgment is critical. Autonomous navigation relies on sensors, algorithms, and artificial intelligence to allow robots to perceive surroundings, make decisions, and navigate independently without direct human intervention. These technologies complement each other by balancing human oversight with automated efficiency in robotics applications.
Key Differences Between Teleoperation and Autonomous Navigation
Teleoperation in robotics involves human operators remotely controlling robots in real-time, providing direct input for precise task execution, while autonomous navigation enables robots to independently perceive, interpret, and respond to their environment using sensors and AI algorithms. Teleoperation offers immediate human judgment and adaptability in complex scenarios, whereas autonomous systems rely on pre-programmed decision-making and real-time data processing for navigation. The key differences lie in control origin, decision-making processes, and reliance on human intervention, influencing efficiency, scalability, and application scope.
Components of Teleoperated Robotics Systems
Teleoperated robotics systems primarily consist of a human-machine interface (HMI), communication links, and the robotic manipulator or mobile platform. The HMI enables real-time control through joysticks, haptic devices, or graphical user interfaces, while the communication link ensures low-latency, high-bandwidth data transmission between the operator and robot. Sensors and feedback mechanisms provide critical data such as position, force, and video streams that facilitate precise manual control in complex environments.
Core Technologies Behind Autonomous Navigation
Core technologies behind autonomous navigation include advanced sensor fusion, simultaneous localization and mapping (SLAM), and machine learning algorithms. These systems integrate data from lidar, cameras, and inertial measurement units (IMUs) to create real-time, accurate environmental maps and enable obstacle detection. Autonomous navigation relies on deep neural networks for path planning and decision-making without human intervention, contrasting with teleoperation where remote human control guides robot movement.
Advantages of Teleoperation in Robotics
Teleoperation in robotics enables precise human control over complex or unpredictable environments, ensuring higher accuracy in delicate tasks compared to fully autonomous systems. It provides real-time human judgment and adaptability, which is essential for handling unexpected obstacles and dynamic scenarios that current AI may struggle with. Teleoperation systems also facilitate safer interactions in hazardous conditions by remotely positioning human operators away from danger zones.
Benefits of Autonomous Navigation for Modern Robots
Autonomous navigation enhances robot efficiency by enabling real-time environment mapping and obstacle avoidance without human intervention, reducing operational delays and costs. Advanced sensors and AI algorithms allow modern robots to perform complex tasks in dynamic or hazardous environments, improving safety and consistency over teleoperated systems. Increased scalability and continuous operation capabilities make autonomous robots ideal for industries such as logistics, agriculture, and manufacturing.
Real-World Applications: Teleoperation vs Autonomous Navigation
Teleoperation enables precise control of robots in complex or unpredictable environments, making it essential for tasks like remote surgery, hazardous material handling, and underwater exploration. Autonomous navigation excels in structured settings such as warehouses and agricultural fields, where pre-mapped routes and sensor data enable efficient and continuous operation. Combining teleoperation with autonomous navigation enhances flexibility and safety in real-world applications, especially in disaster response and military operations.
Challenges and Limitations of Teleoperated Robots
Teleoperated robots face significant challenges including latency issues, limited sensory feedback, and reliance on stable communication links, which can compromise precision and responsiveness in complex environments. Operator fatigue and the necessity for continuous human supervision restrict operational efficiency and scalability. Furthermore, teleoperation struggles in unpredictable or dynamic settings where autonomous navigation algorithms demonstrate superior adaptability and decision-making capabilities.
Obstacles in Achieving Full Autonomous Navigation
Obstacle detection and avoidance remain critical challenges in achieving full autonomous navigation in robotics, often requiring sophisticated sensor fusion and real-time data processing. Teleoperation mitigates these issues by allowing human operators to navigate complex or unpredictable environments remotely, leveraging human intuition and decision-making. Despite advances in AI and machine learning, unreliable sensor data and dynamic obstacle behavior continue to hinder fully autonomous systems' performance in real-world scenarios.
Future Trends: Integrating Teleoperation and Autonomy in Robotics
Future trends in robotics emphasize the seamless integration of teleoperation and autonomous navigation, leveraging advances in AI, machine learning, and sensor fusion to enhance real-time decision-making and precision control. Hybrid systems combining remote human oversight with autonomous functions are expected to improve adaptability and safety in complex environments like disaster response and industrial automation. Enhanced communication protocols and edge computing facilitate low-latency interactions, enabling more efficient collaboration between human operators and robotic systems.
teleoperation vs autonomous navigation Infographic