Synchronous control in robotics ensures coordinated operations by aligning actuator commands with a central clock, resulting in precise timing and predictable system behavior. Asynchronous control allows components to operate independently without waiting for a global signal, enhancing flexibility and responsiveness in dynamic environments. Choosing between synchronous and asynchronous control depends on the application requirements for timing accuracy versus adaptability.
Table of Comparison
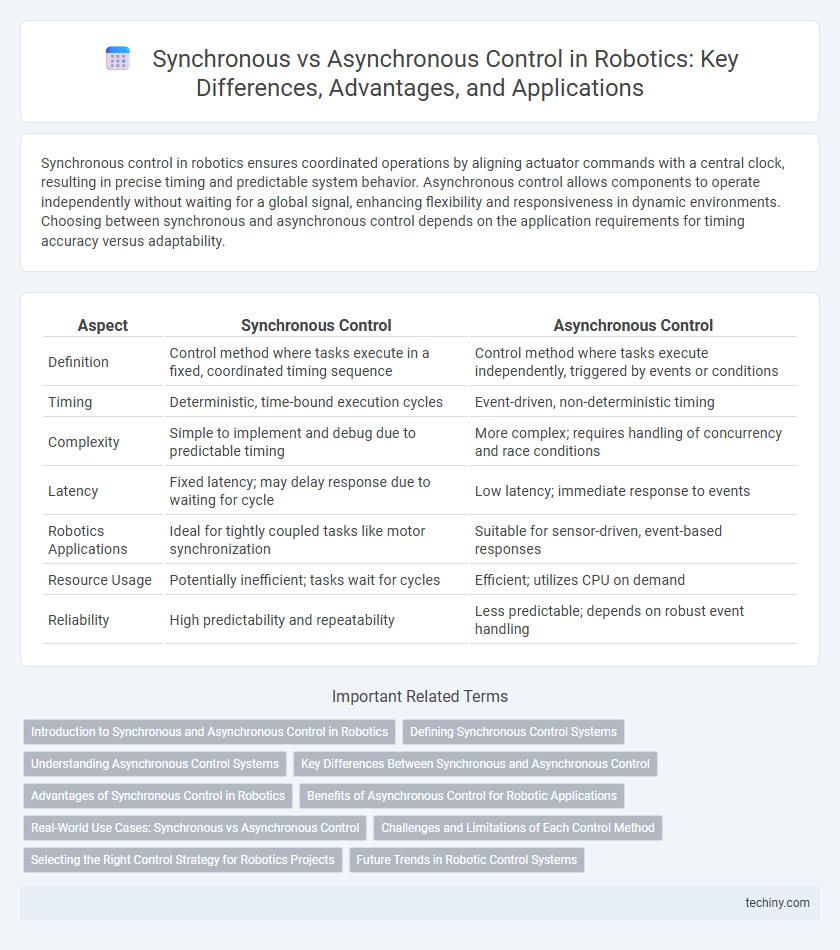
| Aspect | Synchronous Control | Asynchronous Control |
|---|---|---|
| Definition | Control method where tasks execute in a fixed, coordinated timing sequence | Control method where tasks execute independently, triggered by events or conditions |
| Timing | Deterministic, time-bound execution cycles | Event-driven, non-deterministic timing |
| Complexity | Simple to implement and debug due to predictable timing | More complex; requires handling of concurrency and race conditions |
| Latency | Fixed latency; may delay response due to waiting for cycle | Low latency; immediate response to events |
| Robotics Applications | Ideal for tightly coupled tasks like motor synchronization | Suitable for sensor-driven, event-based responses |
| Resource Usage | Potentially inefficient; tasks wait for cycles | Efficient; utilizes CPU on demand |
| Reliability | High predictability and repeatability | Less predictable; depends on robust event handling |
Introduction to Synchronous and Asynchronous Control in Robotics
Synchronous control in robotics involves coordinating multiple robotic components to operate simultaneously based on a shared clock or timing signal, ensuring precise timing and predictable interactions. Asynchronous control allows robotic systems to function independently without relying on a common clock, enabling flexible and responsive operations despite variable execution times. Understanding the differences between synchronous and asynchronous control is crucial for optimizing robotic system performance, particularly in applications requiring real-time coordination or adaptive behavior.
Defining Synchronous Control Systems
Synchronous control systems in robotics operate by coordinating actions based on a shared clock signal, ensuring all components execute tasks simultaneously and in precise timing. This method enhances predictability and reliability in motion control, crucial for applications requiring tight coordination and minimal latency. Synchronous control contrasts with asynchronous systems, where components act independently without a global timing reference.
Understanding Asynchronous Control Systems
Asynchronous control systems operate without a global clock, enabling robotic components to function independently and respond to events in real time, which enhances flexibility and fault tolerance. Unlike synchronous control that relies on precise timing coordination, asynchronous systems reduce latency and power consumption by triggering actions based on data availability or environmental changes. This control approach is critical in complex robotics applications requiring adaptive, event-driven interaction and robust performance under variable conditions.
Key Differences Between Synchronous and Asynchronous Control
Synchronous control in robotics relies on a coordinated timing mechanism ensuring all components operate in lockstep, while asynchronous control allows components to function independently without waiting for synchronization signals. Key differences include response time, where synchronous systems offer predictable, deterministic behavior, contrasted by asynchronous systems' flexibility and higher efficiency in handling variable task loads. Power consumption and complexity also diverge, with synchronous control typically requiring more precise timing hardware and asynchronous control favoring simpler, event-driven processing models.
Advantages of Synchronous Control in Robotics
Synchronous control in robotics offers precise timing coordination, enabling robots to perform complex, multi-axis movements with high accuracy and repeatability. This method reduces latency and synchronization errors, which is critical for applications requiring exact positioning and real-time feedback, such as assembly lines and surgical robots. Enhanced predictability and stability in synchronous control improve overall system efficiency and reliability, particularly in collaborative robot operations.
Benefits of Asynchronous Control for Robotic Applications
Asynchronous control in robotics enhances system responsiveness by allowing independent operation of components, reducing latency and improving real-time adaptability. It supports modular design, enabling easier integration and fault tolerance in complex robotic systems. This approach optimizes resource utilization and scalability, crucial for dynamic and unpredictable environments.
Real-World Use Cases: Synchronous vs Asynchronous Control
Synchronous control in robotics ensures precise coordination of multiple actuators by executing commands at fixed time intervals, critical for applications like robotic assembly lines where timing accuracy affects product quality. Asynchronous control allows independent operation of robotic components, ideal for service robots that interact dynamically with unpredictable environments, enhancing flexibility and responsiveness. Real-world use cases demonstrate synchronous control's advantage in tasks requiring strict timing and synchronization, while asynchronous control excels in scenarios demanding adaptability and event-driven responses.
Challenges and Limitations of Each Control Method
Synchronous control in robotics faces challenges such as rigid timing constraints and increased vulnerability to communication delays, limiting system flexibility and scalability. Asynchronous control contends with complexities in coordinating concurrent processes and handling unpredictable event timings, which can lead to inconsistent states and debugging difficulties. Both methods require careful design trade-offs to balance responsiveness, reliability, and system complexity in robotic applications.
Selecting the Right Control Strategy for Robotics Projects
Choosing between synchronous control and asynchronous control in robotics hinges on project requirements such as timing precision and system complexity. Synchronous control offers precise coordination by executing tasks at fixed time intervals, ideal for applications requiring exact timing like robotic assembly lines. Asynchronous control provides flexibility by responding to events as they occur, enhancing responsiveness in environments with variable inputs or where tasks run independently, making it suitable for autonomous robots and real-time sensor integration.
Future Trends in Robotic Control Systems
Future trends in robotic control systems emphasize the integration of synchronous control for high-precision, time-critical tasks and asynchronous control for flexible, adaptive operations. Advances in AI-driven algorithms enable seamless switching between synchronous and asynchronous modes to optimize performance and efficiency in complex environments. Distributed control architectures are emerging to support real-time data processing and coordinated multi-robot interactions, enhancing scalability and robustness.
Synchronous control vs Asynchronous control Infographic