Proprioception in robotics involves internal sensing mechanisms that enable a robot to understand its own position, movement, and joint angles through sensors embedded within its structure. Exteroception refers to external sensory data collection, using cameras, lidar, or tactile sensors to perceive the environment and obstacles. Combining proprioception and exteroception enhances a robot's ability to navigate complex settings autonomously with improved accuracy and adaptability.
Table of Comparison
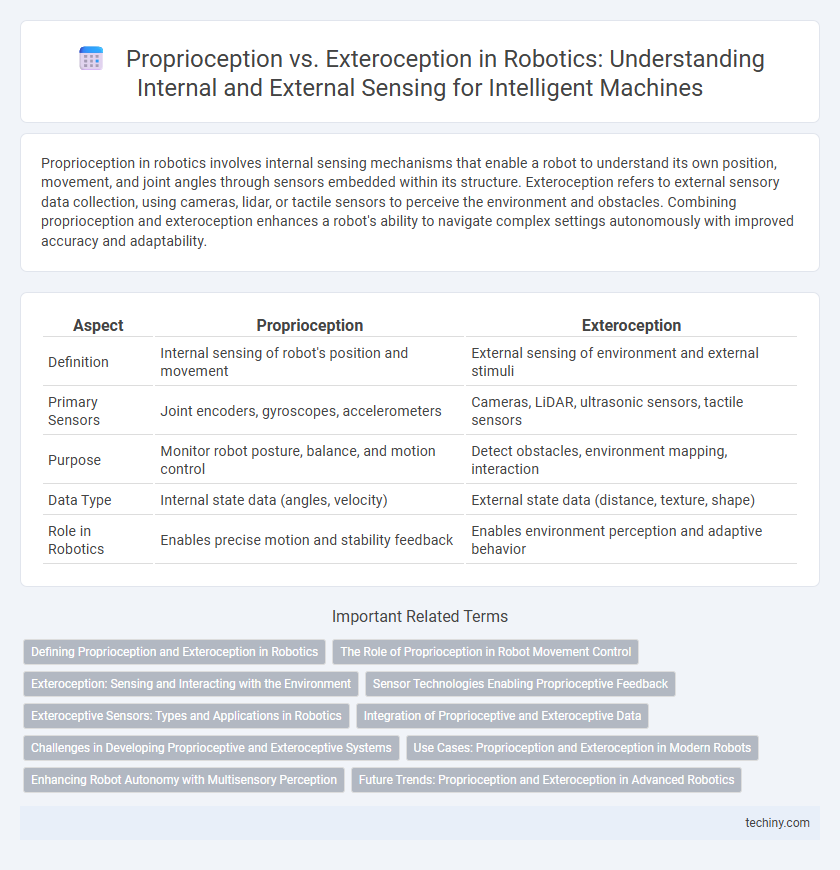
| Aspect | Proprioception | Exteroception |
|---|---|---|
| Definition | Internal sensing of robot's position and movement | External sensing of environment and external stimuli |
| Primary Sensors | Joint encoders, gyroscopes, accelerometers | Cameras, LiDAR, ultrasonic sensors, tactile sensors |
| Purpose | Monitor robot posture, balance, and motion control | Detect obstacles, environment mapping, interaction |
| Data Type | Internal state data (angles, velocity) | External state data (distance, texture, shape) |
| Role in Robotics | Enables precise motion and stability feedback | Enables environment perception and adaptive behavior |
Defining Proprioception and Exteroception in Robotics
Proprioception in robotics refers to the robot's ability to sense its own body position, joint angles, and internal states through internal sensors like encoders and gyroscopes. Exteroception involves gathering information about the external environment using sensors such as cameras, LiDAR, and ultrasonic sensors. Combining proprioception and exteroception enables robots to perform complex tasks by integrating internal state awareness with environmental perception.
The Role of Proprioception in Robot Movement Control
Proprioception in robotics enables precise movement control by providing internal feedback on joint angles, limb positions, and motor forces, allowing robots to adjust actions in real-time without external input. High-resolution proprioceptive sensors such as encoders and force-torque sensors enhance a robot's ability to maintain balance, execute smooth trajectories, and adapt to dynamic environments. This intrinsic sensing complements exteroceptive data, improving autonomy and robustness in complex robotic tasks.
Exteroception: Sensing and Interacting with the Environment
Exteroception in robotics involves the use of external sensors such as cameras, LiDAR, and ultrasonic sensors to detect and interpret environmental stimuli including distance, obstacles, and spatial layout. These sensors enable robots to navigate complex terrains, identify objects, and interact safely within dynamic surroundings by providing real-time data about their external environment. Effective exteroceptive sensing enhances autonomous decision-making and precision in tasks such as object manipulation and environmental mapping.
Sensor Technologies Enabling Proprioceptive Feedback
Proprioceptive feedback in robotics relies on sensor technologies like inertial measurement units (IMUs), strain gauges, and joint encoders to accurately detect internal states such as position, velocity, and force. These sensors enable real-time monitoring of robot limb movements and structural deformations, crucial for precise control and adaptive behaviors. Enhanced proprioceptive sensing supports robust task execution in dynamic environments by providing continuous internal feedback distinct from exteroceptive sensors that measure external stimuli.
Exteroceptive Sensors: Types and Applications in Robotics
Exteroceptive sensors in robotics detect external environmental stimuli, enabling robots to perceive and interact with their surroundings. Common types include vision sensors (cameras and LiDAR) for spatial mapping, tactile sensors for surface texture and pressure detection, and auditory sensors for sound localization and interpretation. These sensors are essential for applications such as autonomous navigation, object recognition, and human-robot interaction, enhancing robotic adaptability and operational efficiency.
Integration of Proprioceptive and Exteroceptive Data
Integration of proprioceptive and exteroceptive data enhances robotic perception by combining internal sensor feedback, such as joint angles and motor forces, with external environmental information from cameras, LIDAR, and tactile sensors. This fusion improves accuracy in real-time motion control, obstacle avoidance, and adaptive behavior in dynamic environments. Advanced algorithms like sensor fusion and deep learning enable robots to build comprehensive situational awareness, leading to more precise and reliable performance.
Challenges in Developing Proprioceptive and Exteroceptive Systems
Developing proprioceptive systems in robotics faces challenges such as accurately sensing joint angles and forces in real-time to enable precise motion control, often hindered by sensor noise and mechanical wear. Exteroceptive systems encounter difficulties in interpreting complex and dynamic environmental data from sensors like cameras and LiDAR, requiring robust algorithms to filter and integrate information for reliable perception. Integrating both proprioceptive and exteroceptive data demands sophisticated sensor fusion techniques to achieve seamless interaction between a robot's internal state and external surroundings, crucial for adaptive and autonomous operation.
Use Cases: Proprioception and Exteroception in Modern Robots
Proprioception in modern robots enables precise internal state monitoring, such as joint angle sensing and motor torque feedback, critical for tasks requiring fine manipulation and balance control. Exteroception complements this by providing external environmental data through sensors like LiDAR, cameras, and tactile arrays, essential for navigation, obstacle detection, and object recognition. Integrating proprioceptive and exteroceptive feedback allows robots to perform complex operations in dynamic environments, enhancing autonomy and interaction capabilities.
Enhancing Robot Autonomy with Multisensory Perception
Proprioception in robotics provides internal state awareness by monitoring joint positions, velocities, and forces, enabling precise motion control and balance. Exteroception involves external environmental sensing through vision, lidar, and tactile sensors, allowing robots to interpret and adapt to dynamic surroundings. Integrating proprioceptive and exteroceptive data enhances robot autonomy by improving navigation, manipulation, and interaction capabilities in complex, unstructured environments.
Future Trends: Proprioception and Exteroception in Advanced Robotics
Future trends in robotics emphasize integrating proprioception and exteroception to achieve superior environmental awareness and adaptive control. Advanced sensor fusion techniques enable robots to combine internal state monitoring with external sensory data for real-time decision-making and enhanced autonomy. Deep learning algorithms further refine this integration, improving robotic navigation, manipulation, and interaction in complex, dynamic environments.
Proprioception vs exteroception Infographic