Holonomic robots have the ability to move instantaneously in any direction within their configuration space, providing greater maneuverability and precision. Nonholonomic robots are constrained by non-integrable motion constraints, limiting their possible movements and requiring more complex path planning. This distinction impacts robotic applications, with holonomic systems favored for tasks demanding agility, while nonholonomic robots are often used in scenarios emphasizing stability and cost efficiency.
Table of Comparison
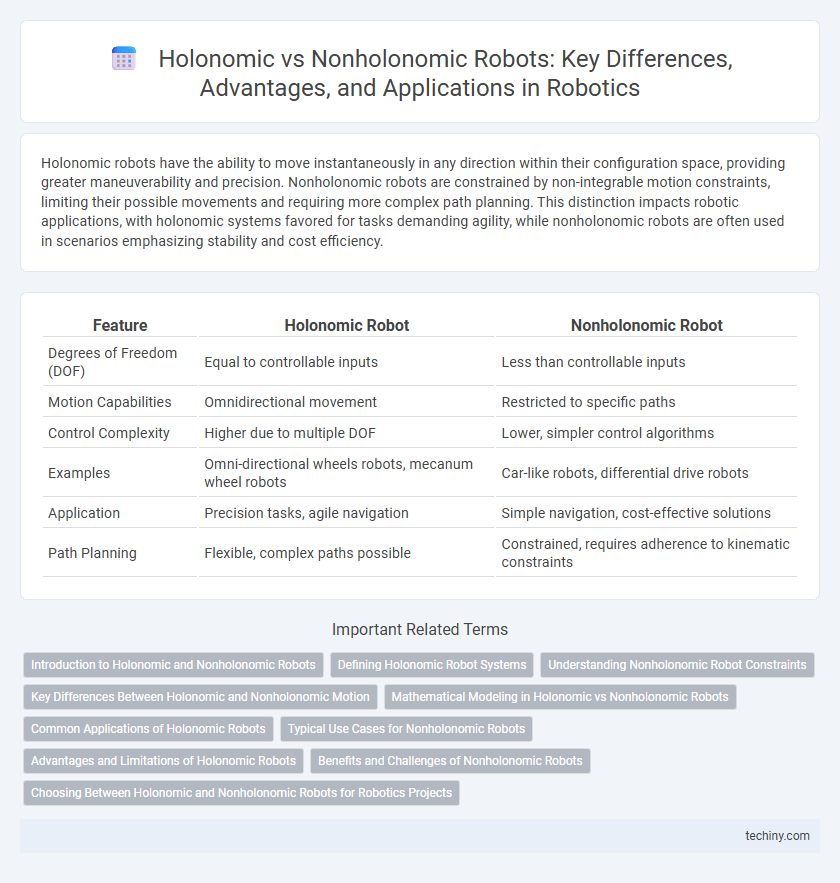
| Feature | Holonomic Robot | Nonholonomic Robot |
|---|---|---|
| Degrees of Freedom (DOF) | Equal to controllable inputs | Less than controllable inputs |
| Motion Capabilities | Omnidirectional movement | Restricted to specific paths |
| Control Complexity | Higher due to multiple DOF | Lower, simpler control algorithms |
| Examples | Omni-directional wheels robots, mecanum wheel robots | Car-like robots, differential drive robots |
| Application | Precision tasks, agile navigation | Simple navigation, cost-effective solutions |
| Path Planning | Flexible, complex paths possible | Constrained, requires adherence to kinematic constraints |
Introduction to Holonomic and Nonholonomic Robots
Holonomic robots possess mobility that allows movement in any direction on a plane, enabling precise and flexible navigation through omnidirectional wheels or specialized drive systems. Nonholonomic robots have constraints on their motion, typically limited to forward and backward movement with steering, which restricts their maneuverability but simplifies control algorithms. Understanding the fundamental differences between holonomic and nonholonomic robots is crucial for designing robotic systems tailored to specific tasks and environments.
Defining Holonomic Robot Systems
Holonomic robot systems possess the ability to move instantaneously in any direction within their configuration space, characterized by having as many controllable degrees of freedom as mobility degrees of freedom. These robots typically employ omnidirectional wheels or mecanum wheels, enabling precise and versatile maneuvering in complex environments. In contrast, nonholonomic robots face constraints on their motion, limiting their movement to specific trajectories and often requiring more complex path planning algorithms.
Understanding Nonholonomic Robot Constraints
Nonholonomic robots face motion constraints that limit their ability to move directly along certain paths, such as robots with wheels that cannot slide sideways. These constraints are described by non-integrable differential equations, restricting the robot's instantaneous velocity inputs and requiring complex control strategies for navigation. Understanding these constraints is crucial for designing effective path-planning algorithms and ensuring precise maneuverability in applications like autonomous vehicles and mobile robotics.
Key Differences Between Holonomic and Nonholonomic Motion
Holonomic robots possess independent control over all degrees of freedom, enabling omnidirectional movement and precise maneuverability in complex environments. Nonholonomic robots have motion constraints restricting their movement to specific paths, typically relying on steering mechanisms that limit lateral displacement. The primary distinction lies in the degree of mobility; holonomic systems can instantaneously attain any velocity vector within their configuration space, whereas nonholonomic systems must execute sequential movements to change direction.
Mathematical Modeling in Holonomic vs Nonholonomic Robots
Holonomic robots have degrees of freedom equal to their controllable inputs, allowing direct mathematical modeling through integrable kinematic equations that simplify trajectory planning. Nonholonomic robots possess constraints expressed as non-integrable differential equations, requiring complex control algorithms to handle velocity constraints and motion generation. Mathematical models for nonholonomic systems leverage nonlinear control theory and differential geometry, contrasting with the straightforward linear models often used for holonomic robots.
Common Applications of Holonomic Robots
Holonomic robots are extensively used in applications requiring precise and omnidirectional movement, such as automated warehouse systems and robotic soccer. Their ability to move in any direction without changing orientation makes them ideal for environments where space is limited and maneuverability is crucial. Common industries utilizing holonomic robots include manufacturing automation, logistics, and research laboratories focusing on dynamic motion control.
Typical Use Cases for Nonholonomic Robots
Nonholonomic robots are commonly used in applications requiring precise navigation in constrained environments, such as automated guided vehicles (AGVs) in warehouses and mobile robots for delivery services. Their motion constraints make them ideal for tasks involving path planning on flat surfaces where turning radius limitations are critical, like parking assist systems in autonomous cars. Industrial automation and ground-based inspection robots often rely on nonholonomic designs to balance maneuverability with mechanical simplicity.
Advantages and Limitations of Holonomic Robots
Holonomic robots possess the advantage of full mobility in all directions, enabling precise and flexible movement essential for complex navigation and manipulation tasks. Their ability to instantly change direction enhances operational efficiency in confined or dynamic environments, improving performance in applications like automated warehousing and surgical robotics. However, holonomic robots often incur higher mechanical complexity and cost compared to nonholonomic robots, with increased demands on control algorithms and power consumption limiting their practicality in simpler or resource-constrained scenarios.
Benefits and Challenges of Nonholonomic Robots
Nonholonomic robots offer benefits such as simplified mechanical design and improved stability due to constraints in their motion, which make them ideal for navigating structured environments like warehouses and factories. Challenges include limited maneuverability and path planning complexity, requiring sophisticated algorithms to overcome non-integrable motion constraints. Their inability to move directly sideways limits flexibility, making precise control and obstacle avoidance more demanding compared to holonomic robots.
Choosing Between Holonomic and Nonholonomic Robots for Robotics Projects
Choosing between holonomic and nonholonomic robots depends on the project's mobility requirements and complexity. Holonomic robots offer full directional movement, allowing precise navigation in tight spaces, ideal for applications requiring high maneuverability such as warehouse automation. Nonholonomic robots, limited by constraints like no lateral movement, excel in simpler, cost-effective designs suited for path-following tasks in structured environments like agriculture or delivery systems.
Holonomic robot vs nonholonomic robot Infographic