Telepresence enables users to experience and interact with remote environments through video and audio streaming, enhancing situational awareness. Telemanipulation involves controlling robotic arms or tools to perform precise physical tasks at a distance, allowing for direct interaction with objects. Both technologies expand the reach of robotics in fields like medicine, hazardous materials handling, and exploration, but telemanipulation requires more complex control systems and haptic feedback to replicate human dexterity.
Table of Comparison
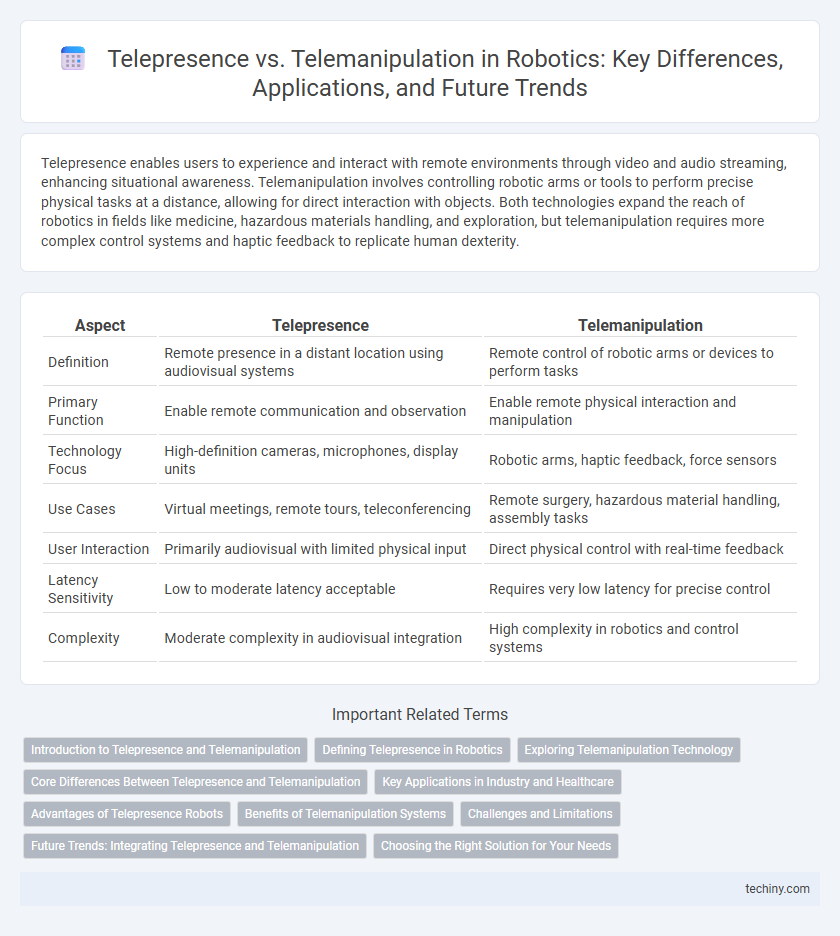
| Aspect | Telepresence | Telemanipulation |
|---|---|---|
| Definition | Remote presence in a distant location using audiovisual systems | Remote control of robotic arms or devices to perform tasks |
| Primary Function | Enable remote communication and observation | Enable remote physical interaction and manipulation |
| Technology Focus | High-definition cameras, microphones, display units | Robotic arms, haptic feedback, force sensors |
| Use Cases | Virtual meetings, remote tours, teleconferencing | Remote surgery, hazardous material handling, assembly tasks |
| User Interaction | Primarily audiovisual with limited physical input | Direct physical control with real-time feedback |
| Latency Sensitivity | Low to moderate latency acceptable | Requires very low latency for precise control |
| Complexity | Moderate complexity in audiovisual integration | High complexity in robotics and control systems |
Introduction to Telepresence and Telemanipulation
Telepresence enables users to experience and interact with remote environments through real-time video and audio streaming, immersing them as if physically present. Telemanipulation extends this concept by integrating robotic arms and actuators controlled remotely, allowing precise physical interaction and manipulation of objects. Both technologies leverage advanced sensors and haptic feedback to enhance user control and situational awareness in applications like remote surgery, hazardous environment exploration, and industrial automation.
Defining Telepresence in Robotics
Telepresence in robotics refers to the technology that allows a human operator to remotely experience and interact with a robot's environment through real-time sensory feedback, often including visual, auditory, and haptic inputs. This immersive control enables precise situational awareness and decision-making from a distant location, essential in hazardous or inaccessible areas. Unlike telemanipulation, which emphasizes direct physical control of robotic limbs, telepresence prioritizes the overall remote sensory experience and environment perception.
Exploring Telemanipulation Technology
Telemanipulation technology enables users to remotely control robotic arms and devices with precision, enhancing interaction in hazardous or inaccessible environments compared to telepresence, which primarily focuses on remote presence and observation. Advanced haptic feedback systems in telemanipulation provide tactile sensations, improving user control and task accuracy in applications such as medical surgery, hazardous materials handling, and space exploration. Continuous advancements in sensor integration and artificial intelligence are driving telemanipulation towards greater autonomy and responsiveness, expanding its role in complex robotic operations.
Core Differences Between Telepresence and Telemanipulation
Telepresence primarily focuses on allowing users to experience remote environments through video, audio, and sensory feedback, enabling immersive interaction without physical manipulation. Telemanipulation involves direct control of robotic arms or devices to perform physical tasks in remote locations, emphasizing precision and responsiveness in handling objects. The core difference lies in telepresence providing observational and situational awareness, while telemanipulation enables active physical intervention and task execution.
Key Applications in Industry and Healthcare
Telepresence in robotics enables remote monitoring and communication in industrial settings, enhancing safety and operational efficiency by allowing experts to oversee processes without physical presence. Telemanipulation involves the remote control of robotic arms or devices to perform precise tasks in hazardous environments such as nuclear plants or surgical procedures in healthcare, minimizing human exposure to risk. Both technologies are critical in healthcare for remote surgeries and patient interaction, and in industry for maintenance, inspection, and hazardous task execution.
Advantages of Telepresence Robots
Telepresence robots offer significant advantages such as enabling remote presence with immersive audio-visual communication, which enhances real-time interaction and situational awareness. They reduce travel costs and time while providing access to hazardous or inaccessible environments without physical risk. Furthermore, telepresence robots improve collaboration and decision-making by allowing users to observe and communicate naturally from a distance.
Benefits of Telemanipulation Systems
Telemanipulation systems provide precise control over robotic arms, enabling operators to perform complex physical tasks remotely with high dexterity and feedback. These systems enhance safety by allowing interaction with hazardous environments while reducing human exposure to risk. By combining real-time haptic feedback and immersive interfaces, telemanipulation improves accuracy and efficiency in fields such as surgery, manufacturing, and hazardous material handling.
Challenges and Limitations
Telepresence systems face challenges such as limited sensory feedback and latency issues that hinder real-time interaction, affecting user immersion and control precision. Telemanipulation encounters mechanical constraints, including restricted degrees of freedom and force feedback inaccuracies, which reduce operational dexterity and safety in hazardous environments. Both technologies grapple with bandwidth limitations and cybersecurity risks that impact remote operation reliability and data privacy.
Future Trends: Integrating Telepresence and Telemanipulation
Future trends in robotics emphasize the seamless integration of telepresence and telemanipulation technologies to enhance remote operational capabilities. Advanced AI algorithms and haptic feedback systems enable more intuitive control and immersive experiences, facilitating precise manipulation in hazardous or inaccessible environments. This convergence drives innovation in sectors such as healthcare, manufacturing, and disaster response, expanding the potential applications of teleoperated robotic systems.
Choosing the Right Solution for Your Needs
Telepresence systems prioritize immersive remote presence through video and audio, ideal for virtual meetings and remote inspections, while telemanipulation emphasizes precise robotic control to perform complex tasks from a distance. Selecting the right solution depends on task requirements, where telepresence suits observation-centric roles and telemanipulation fits environments demanding physical interaction, such as hazardous material handling or surgical robotics. Evaluating factors like latency, control complexity, and environmental conditions ensures optimal performance and user experience in your robotics application.
Telepresence vs Telemanipulation Infographic