ROS offers a comprehensive framework with extensive community support and a wide range of tools for robot software development, making it ideal for complex, modular robotic systems. YARP provides a flexible and lightweight middleware focused on real-time communication and device interoperability, which is beneficial for robotics researchers requiring low-latency performance. Choosing between ROS and YARP depends on project requirements such as scalability, communication protocols, and hardware integration needs.
Table of Comparison
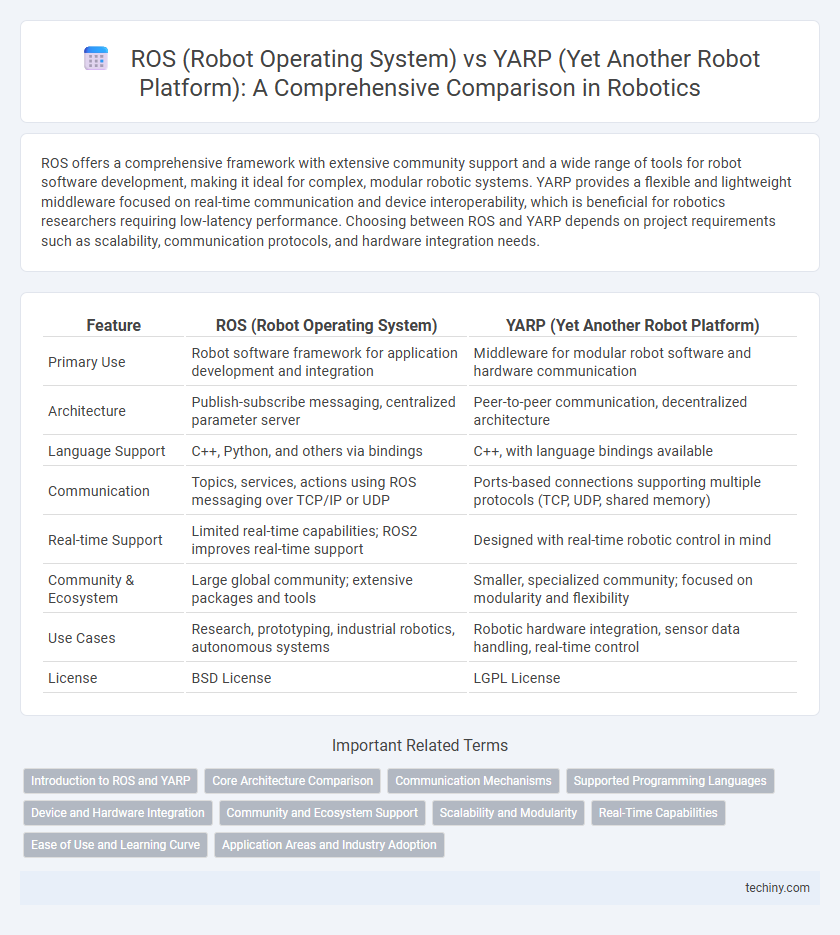
| Feature | ROS (Robot Operating System) | YARP (Yet Another Robot Platform) |
|---|---|---|
| Primary Use | Robot software framework for application development and integration | Middleware for modular robot software and hardware communication |
| Architecture | Publish-subscribe messaging, centralized parameter server | Peer-to-peer communication, decentralized architecture |
| Language Support | C++, Python, and others via bindings | C++, with language bindings available |
| Communication | Topics, services, actions using ROS messaging over TCP/IP or UDP | Ports-based connections supporting multiple protocols (TCP, UDP, shared memory) |
| Real-time Support | Limited real-time capabilities; ROS2 improves real-time support | Designed with real-time robotic control in mind |
| Community & Ecosystem | Large global community; extensive packages and tools | Smaller, specialized community; focused on modularity and flexibility |
| Use Cases | Research, prototyping, industrial robotics, autonomous systems | Robotic hardware integration, sensor data handling, real-time control |
| License | BSD License | LGPL License |
Introduction to ROS and YARP
ROS (Robot Operating System) is a flexible framework widely used for developing robot software, offering tools, libraries, and conventions to simplify complex robot behaviors. YARP (Yet Another Robot Platform) provides a modular and customizable middleware designed for real-time robotic applications, emphasizing communication and device abstraction. Both platforms support multi-robot systems, but ROS is known for its extensive community and broad ecosystem, while YARP excels in low-level hardware interfacing and real-time performance.
Core Architecture Comparison
ROS features a modular and distributed architecture based on nodes and topics, enabling flexible communication through publish-subscribe messaging and service calls, which supports real-time robotics applications. YARP utilizes a decentralized, peer-to-peer communication framework emphasizing network transparency and device abstraction, offering highly customizable inter-process communication with a strong focus on robotics control systems. The core distinction lies in ROS's emphasis on standardized middleware and ecosystem integration, whereas YARP prioritizes low-level hardware interaction and flexible network protocols.
Communication Mechanisms
ROS utilizes a publish-subscribe messaging model with topics and services enabling asynchronous and synchronous communication, which simplifies integration and scalability in robotic systems. YARP employs a more flexible approach with ports and connections supporting multiple transport protocols such as TCP, UDP, and shared memory, emphasizing low-latency and real-time data streaming. Both frameworks support modularity, but ROS's standardized message definitions enhance interoperability, while YARP's customizable communication mechanisms cater to heterogeneous hardware environments.
Supported Programming Languages
ROS primarily supports C++ and Python, offering extensive libraries and tools for robot application development, while also accommodating Lisp and JavaScript through additional packages. YARP provides multi-language support including C++, Python, Java, and MATLAB, facilitating versatile communication and device driver integration across robotic platforms. The choice between ROS and YARP often depends on specific project language requirements and ecosystem compatibility.
Device and Hardware Integration
ROS excels in device and hardware integration through its extensive library of standardized drivers and middleware components that ensure compatibility across diverse robotic sensors and actuators. YARP offers a modular communication framework optimized for real-time interaction with heterogeneous hardware, promoting seamless data flow and device abstraction. The choice between ROS and YARP depends on system requirements, with ROS providing broader community support and device availability, while YARP delivers flexibility for custom hardware configurations and low-latency communication.
Community and Ecosystem Support
ROS (Robot Operating System) boasts a large, active community with extensive ecosystem support, including numerous open-source libraries, tutorials, and industry collaborations that accelerate robot development and integration. YARP (Yet Another Robot Platform) maintains a smaller, specialized user base primarily focused on modular communication and middleware for complex robotics research, offering deep customization but less widespread community resources. The vibrant ROS ecosystem supports a broad range of robot platforms and sensors, enhancing interoperability, while YARP's niche community emphasizes real-time data streaming and flexible network architectures for advanced robotic applications.
Scalability and Modularity
ROS (Robot Operating System) offers extensive scalability through its modular architecture, enabling developers to integrate numerous packages and nodes for complex robotic systems. YARP (Yet Another Robot Platform) emphasizes modularity with flexible communication protocols and dynamic component management, facilitating easier reconfiguration and interoperability between heterogeneous devices. Both frameworks support distributed computation, but ROS's large ecosystem and standardized interfaces provide enhanced scalability for large-scale robotic applications.
Real-Time Capabilities
ROS primarily supports non-real-time robotics applications with extensions like ROS 2 introducing real-time capabilities through DDS middleware, making it suitable for complex, distributed systems requiring moderate real-time performance. YARP excels in real-time robotic control by offering low-latency communication and fine-grained control over data flow, making it ideal for robots demanding strict timing constraints. The choice between ROS and YARP depends on the specific real-time requirements and system architecture of the robotic application.
Ease of Use and Learning Curve
ROS (Robot Operating System) offers a more extensive and user-friendly ecosystem with comprehensive documentation, tutorials, and community support, making it easier for beginners to adopt. YARP (Yet Another Robot Platform) provides flexible middleware tailored for complex robotics applications but has a steeper learning curve due to less standardized tools and smaller community resources. Developers seeking rapid prototyping and widespread community assistance typically prefer ROS, while YARP suits advanced users requiring customizable communication frameworks.
Application Areas and Industry Adoption
ROS (Robot Operating System) dominates in academic research, industrial automation, and autonomous vehicles due to its extensive libraries, active community, and strong support for sensor integration. YARP (Yet Another Robot Platform) excels in humanoid robotics and experimental platforms, favored in robotic labs for its modularity and real-time communication. Industry adoption shows ROS as the leading middleware in commercial robotics, while YARP remains niche with specialized use in research institutions.
ROS (Robot Operating System) vs YARP (Yet Another Robot Platform) Infographic