Differential steering allows robots to pivot by varying the speed of wheels on either side, offering high maneuverability in tight spaces. Ackermann steering mimics traditional vehicle steering, enabling smooth turns by adjusting the angle of the front wheels for better stability at higher speeds. Choosing between differential and Ackermann steering depends on the application's requirements for precision turning versus speed and stability.
Table of Comparison
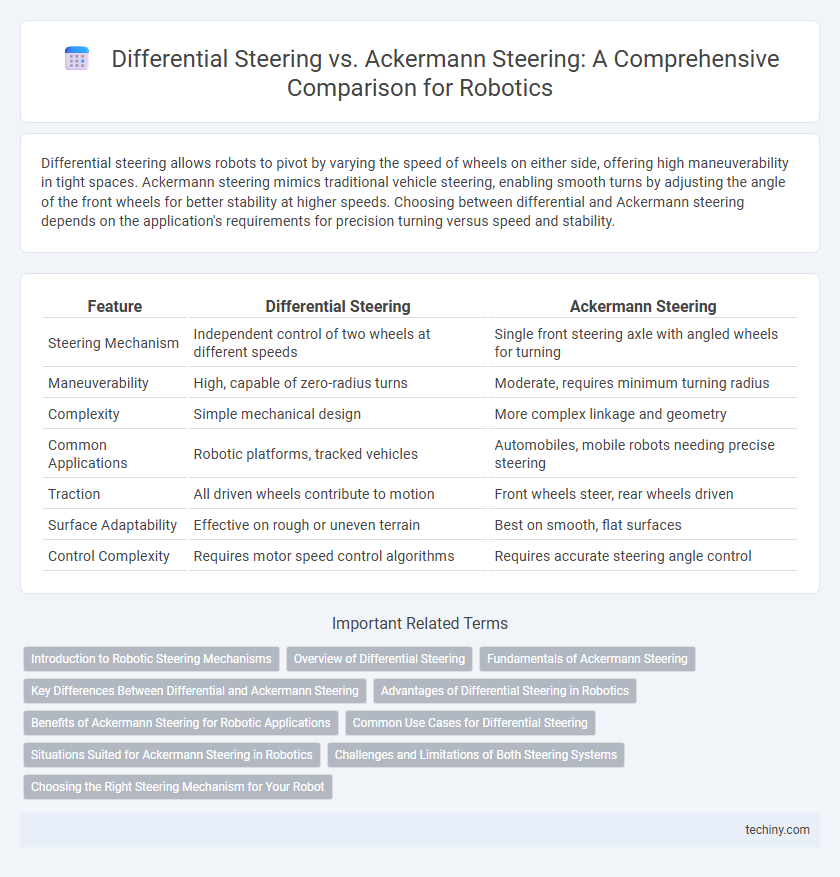
| Feature | Differential Steering | Ackermann Steering |
|---|---|---|
| Steering Mechanism | Independent control of two wheels at different speeds | Single front steering axle with angled wheels for turning |
| Maneuverability | High, capable of zero-radius turns | Moderate, requires minimum turning radius |
| Complexity | Simple mechanical design | More complex linkage and geometry |
| Common Applications | Robotic platforms, tracked vehicles | Automobiles, mobile robots needing precise steering |
| Traction | All driven wheels contribute to motion | Front wheels steer, rear wheels driven |
| Surface Adaptability | Effective on rough or uneven terrain | Best on smooth, flat surfaces |
| Control Complexity | Requires motor speed control algorithms | Requires accurate steering angle control |
Introduction to Robotic Steering Mechanisms
Differential steering enables robots to make tight turns by varying the speed of wheels on either side, commonly used in tracked and wheeled robots for enhanced maneuverability in confined spaces. Ackermann steering, typical of conventional vehicles, uses a geometric steering linkage to ensure wheels turn at appropriate angles for smooth cornering and reduced tire slip. Understanding these steering mechanisms is fundamental for selecting the optimal drive system in mobile robotics, balancing precision, stability, and terrain adaptability.
Overview of Differential Steering
Differential steering uses the independent control of two wheels on either side of a robot, enabling precise turning by varying wheel speeds to pivot or spin in place. This method offers high maneuverability and simplicity, making it ideal for compact or tracked robots navigating tight spaces. Differential steering systems eliminate the need for complex steering linkages, reducing mechanical complexity and maintenance requirements.
Fundamentals of Ackermann Steering
Ackermann steering is designed to optimize wheel angles during turns, ensuring that all wheels follow concentric circular paths, which reduces tire slip and improves maneuverability. This steering geometry aligns the inner and outer wheels at appropriate steering angles based on vehicle geometry, particularly the wheelbase and track width. Unlike differential steering, which relies on varying wheel speeds for direction, Ackermann steering mechanically adjusts the front wheel angles to achieve smooth and stable cornering in wheeled vehicles.
Key Differences Between Differential and Ackermann Steering
Differential steering controls a robot's direction by varying the speed of two independently driven wheels on opposite sides, enabling zero-radius turns and high maneuverability in tight spaces. Ackermann steering uses a mechanism that steers the front wheels at different angles to ensure proper tire alignment during turns, which reduces tire slip and improves stability at higher speeds. Key differences include maneuverability, with differential steering excelling in confined environments, while Ackermann steering provides smoother turns and better traction on road surfaces.
Advantages of Differential Steering in Robotics
Differential steering offers enhanced maneuverability in confined spaces by independently controlling the speed of each wheel, allowing robots to execute zero-radius turns crucial for navigation in cluttered environments. This steering method simplifies mechanical design by eliminating the need for complex linkages, reducing weight, and enhancing reliability in mobile robotic platforms. Its precise control over individual wheel velocities facilitates better traction and adaptability on uneven terrain, making differential steering ideal for diverse robotic applications.
Benefits of Ackermann Steering for Robotic Applications
Ackermann steering offers superior maneuverability and stability for robotic vehicles navigating tight urban or indoor environments by accurately aligning front wheels to minimize tire slip during turns. This steering geometry enhances control precision, reducing wear on components and improving energy efficiency compared to differential steering systems. The design is especially beneficial for autonomous robots requiring smooth, predictable handling on paved or structured surfaces.
Common Use Cases for Differential Steering
Differential steering is widely used in mobile robots requiring high maneuverability and compact design, such as autonomous delivery robots and indoor service robots. This steering mechanism allows for zero-radius turns, enabling precise navigation in tight spaces and cluttered environments. It is also favored in robotics platforms designed for exploration or inspection where adaptable and agile movement is critical.
Situations Suited for Ackermann Steering in Robotics
Ackermann steering is ideal for robotic applications requiring precise maneuverability on paved surfaces, such as autonomous vehicles and delivery robots operating in urban environments. Its geometry minimizes tire slip during turns, enhancing control and stability at higher speeds. This steering setup is especially beneficial for robots navigating narrow streets or structured pathways where smooth and accurate steering is critical.
Challenges and Limitations of Both Steering Systems
Differential steering faces challenges in precise control due to wheel slip and varying surface traction, limiting its effectiveness on uneven or slippery terrains. Ackermann steering struggles with increased mechanical complexity and larger turning radii, posing limitations for tight maneuvering in confined spaces. Both systems require advanced sensor integration and control algorithms to overcome issues like wheel alignment errors and dynamic stability in autonomous robotic applications.
Choosing the Right Steering Mechanism for Your Robot
Differential steering offers enhanced maneuverability for robots in tight spaces by independently controlling wheel speeds on either side, making it ideal for compact or indoor robots. Ackermann steering mimics traditional car-like handling with better stability at higher speeds, suited for outdoor or larger robotic platforms requiring smooth turns. Selecting the appropriate steering mechanism depends on the robot's intended environment, speed requirements, and maneuverability needs, directly impacting overall performance and control accuracy.
Differential Steering vs Ackermann Steering Infographic