ROS2 improves upon ROS1 by offering enhanced real-time capabilities, better security features, and native support for multi-robot systems, making it more suitable for complex and commercial robotics applications. Unlike ROS1, which relies heavily on a single master node, ROS2 utilizes a decentralized architecture that increases system robustness and scalability. The transition from ROS1 to ROS2 involves changes in communication protocols and middleware, requiring developers to adapt their code for improved performance and future compatibility.
Table of Comparison
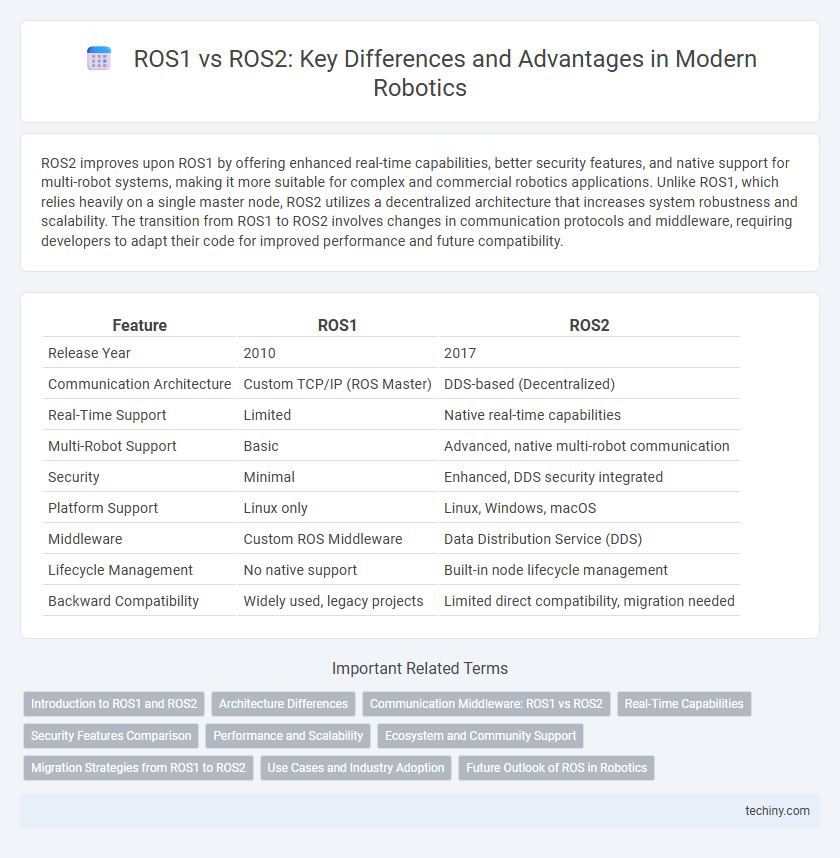
| Feature | ROS1 | ROS2 |
|---|---|---|
| Release Year | 2010 | 2017 |
| Communication Architecture | Custom TCP/IP (ROS Master) | DDS-based (Decentralized) |
| Real-Time Support | Limited | Native real-time capabilities |
| Multi-Robot Support | Basic | Advanced, native multi-robot communication |
| Security | Minimal | Enhanced, DDS security integrated |
| Platform Support | Linux only | Linux, Windows, macOS |
| Middleware | Custom ROS Middleware | Data Distribution Service (DDS) |
| Lifecycle Management | No native support | Built-in node lifecycle management |
| Backward Compatibility | Widely used, legacy projects | Limited direct compatibility, migration needed |
Introduction to ROS1 and ROS2
ROS1, the first version of the Robot Operating System, established a modular framework enabling robotic software development with features like message-passing, hardware abstraction, and package management. ROS2 builds on ROS1 by introducing improvements in real-time capabilities, multi-robot support, and enhanced security protocols, leveraging DDS (Data Distribution Service) middleware for scalable and reliable communication. Both ROS1 and ROS2 provide extensive tools and libraries, but ROS2's architecture supports modern robotics applications requiring robust performance and flexibility.
Architecture Differences
ROS2 features a modular, distributed architecture with DDS (Data Distribution Service) as its communication middleware, providing real-time capabilities and improved security compared to ROS1's centralized ROS Master architecture. ROS1 relies on a single ROS Master node to manage message passing, which limits scalability and introduces single points of failure. The architectural advancements in ROS2 enable better cross-platform support and enhanced multi-robot systems integration through decentralized node discovery and communication.
Communication Middleware: ROS1 vs ROS2
ROS1 primarily relies on ROS Master and custom TCP/IP protocols for node communication, which limits scalability and introduces potential single points of failure. ROS2 utilizes DDS (Data Distribution Service) as its communication middleware, enabling real-time, decentralized, and more robust data exchange with improved Quality of Service (QoS) settings. This transition enhances interoperability, supports multi-robot systems, and provides better performance in complex robotic applications.
Real-Time Capabilities
ROS2 significantly enhances real-time capabilities compared to ROS1 by integrating support for real-time operating systems (RTOS) and introducing a more deterministic communication architecture based on DDS (Data Distribution Service). ROS1's single-threaded executors and less predictable middleware limit its real-time performance, making it less suitable for time-critical robotic applications. The modularity and improved quality of service (QoS) settings in ROS2 enable finer control over latency and jitter, essential for achieving reliable real-time behavior in robotics.
Security Features Comparison
ROS2 introduces enhanced security features such as DDS Security for authentication, encryption, and access control, addressing the vulnerabilities found in ROS1's lack of built-in security mechanisms. ROS1 relies heavily on external tools and network configurations for security, which can lead to inconsistent protection and increased risk of cyber threats. The transition from ROS1 to ROS2 significantly strengthens cybersecurity measures, enabling more robust and secure robotic applications suitable for industrial and commercial deployment.
Performance and Scalability
ROS2 significantly outperforms ROS1 in terms of real-time capabilities and communication efficiency, thanks to its DDS-based middleware that supports quality of service (QoS) settings. The modular architecture of ROS2 enables better scalability across distributed systems, accommodating complex multi-robot deployments and large-scale industrial applications. Enhanced support for multi-threading and improved security features further boost the performance and reliability of ROS2 compared to ROS1.
Ecosystem and Community Support
ROS1 offers a mature ecosystem with extensive libraries, tools, and a large, established community contributing to comprehensive documentation and numerous third-party packages. ROS2, designed for improved performance and real-time capabilities, rapidly expands its ecosystem with growing industry adoption and increasing developer engagement. Community support for ROS2 is strengthening through active forums, ongoing standardization efforts, and integration with modern middleware, making it a forward-looking choice for complex robotic applications.
Migration Strategies from ROS1 to ROS2
Migrating from ROS1 to ROS2 involves analyzing existing ROS1 packages, identifying compatibility issues, and adapting or redesigning nodes to leverage ROS2's DDS middleware and improved security features. Developers prioritize using ROS2-native tools like ros2_control and transitioning to its communication paradigms such as asynchronous callbacks and real-time capabilities, ensuring seamless integration with modern robotics hardware. Gradual migration strategies include hybrid systems running ROS1 and ROS2 bridges to maintain operability during incremental upgrades and testing phases.
Use Cases and Industry Adoption
ROS1 remains widely used in academic research and prototyping due to its extensive library support and stable community resources, while ROS2 is increasingly adopted in industrial applications requiring real-time performance, enhanced security, and multi-robot coordination. Automotive, aerospace, and manufacturing sectors favor ROS2 for its improved middleware communication protocols and deterministic behavior essential for safety-critical environments. Transitioning from ROS1 to ROS2 enables organizations to leverage advancements in scalability and modularity, driving innovation in autonomous systems and collaborative robotics.
Future Outlook of ROS in Robotics
ROS2 offers enhanced real-time capabilities, improved security features, and native support for multi-robot systems, addressing the limitations of ROS1 critical for advanced robotics applications. As autonomous systems and AI integration grow, ROS2's modular architecture and middleware abstraction position it as the preferred framework for next-generation robotic development. Continuous community-driven improvements and expanded industry adoption signal a strong trajectory for ROS2 shaping the future of robotics innovation.
ROS1 vs ROS2 Infographic