Joint space control involves managing a robot's movements by directly manipulating its joint angles and velocities, offering precise control over individual actuators. Task space control focuses on controlling the robot's end-effector position and orientation in Cartesian coordinates, enabling the execution of complex tasks in a defined workspace. Understanding the differences between joint space and task space control is crucial for optimizing robot trajectory planning and improving overall manipulation efficiency.
Table of Comparison
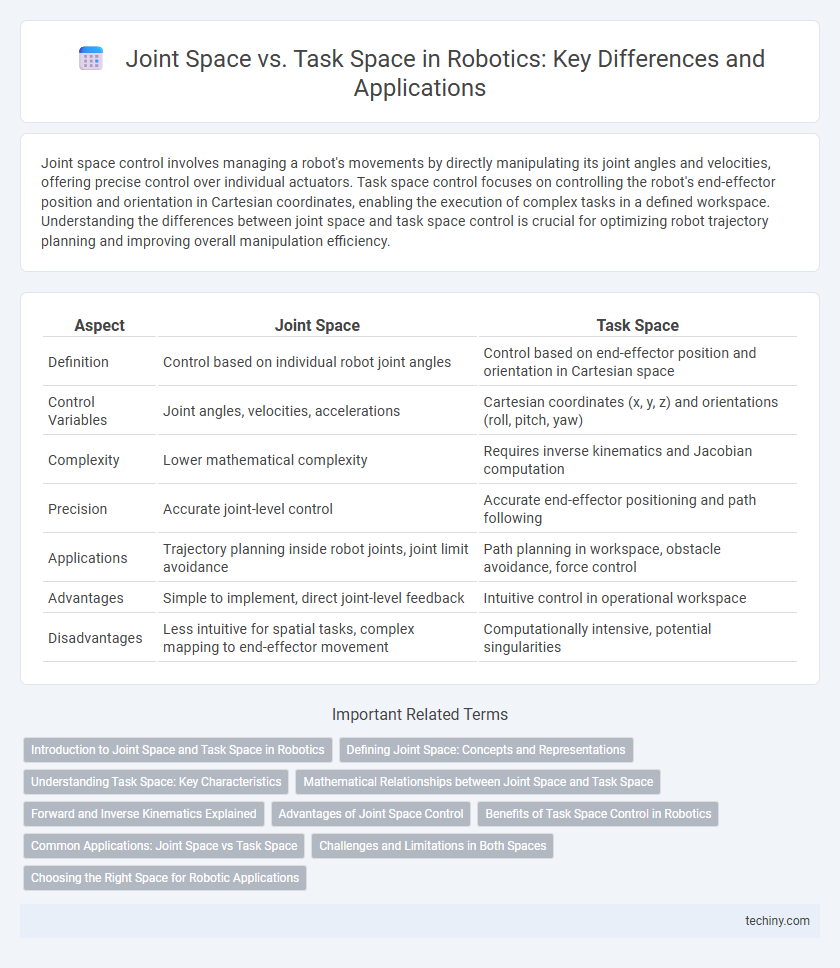
| Aspect | Joint Space | Task Space |
|---|---|---|
| Definition | Control based on individual robot joint angles | Control based on end-effector position and orientation in Cartesian space |
| Control Variables | Joint angles, velocities, accelerations | Cartesian coordinates (x, y, z) and orientations (roll, pitch, yaw) |
| Complexity | Lower mathematical complexity | Requires inverse kinematics and Jacobian computation |
| Precision | Accurate joint-level control | Accurate end-effector positioning and path following |
| Applications | Trajectory planning inside robot joints, joint limit avoidance | Path planning in workspace, obstacle avoidance, force control |
| Advantages | Simple to implement, direct joint-level feedback | Intuitive control in operational workspace |
| Disadvantages | Less intuitive for spatial tasks, complex mapping to end-effector movement | Computationally intensive, potential singularities |
Introduction to Joint Space and Task Space in Robotics
Robotic control operates primarily in two coordinate systems: joint space and task space, each defining robot positioning differently. Joint space refers to the set of individual joint parameters, such as angles for revolute joints or displacements for prismatic joints, that dictate the robot's configuration. Task space, also known as Cartesian space, represents the robot end-effector's position and orientation in the 3D operational environment, enabling direct spatial manipulation and path planning.
Defining Joint Space: Concepts and Representations
Joint space in robotics refers to the multidimensional coordinate system defined by the robot's individual joint angles or displacements, which directly determine the manipulator's configuration. Each joint variable represents a degree of freedom, allowing precise control of the robot's posture without directly specifying the end-effector's position or orientation in the workspace. This representation is fundamental for inverse kinematics calculations and motion planning within the robot's mechanical constraints.
Understanding Task Space: Key Characteristics
Task space in robotics refers to the coordinate system in which the robot's end-effector operates, typically defined by position and orientation parameters essential for manipulating objects. Unlike joint space, which focuses on individual joint angles and actuator positions, task space emphasizes the robot's interaction with its environment and the completion of specific tasks. Understanding task space is crucial for advanced robotic control, enabling precise trajectory planning and obstacle avoidance in dynamic environments.
Mathematical Relationships between Joint Space and Task Space
Mathematical relationships between joint space and task space are primarily defined by kinematic equations, where joint angles (th) map to end-effector positions and orientations through forward kinematics, represented as \( \mathbf{x} = f(\mathbf{\theta}) \). Inverse kinematics solves this relationship by determining joint variables \( \mathbf{\theta} = f^{-1}(\mathbf{x}) \) based on desired task-space coordinates, often involving nonlinear equation solving or numerical methods. The Jacobian matrix \( \mathbf{J}(\mathbf{\theta}) \) plays a crucial role, relating joint velocities \( \dot{\mathbf{\theta}} \) to task-space velocities \( \dot{\mathbf{x}} \) via \( \dot{\mathbf{x}} = \mathbf{J}(\mathbf{\theta}) \dot{\mathbf{\theta}} \), enabling dynamic control and velocity mapping between spaces.
Forward and Inverse Kinematics Explained
Forward kinematics calculates a robot arm's end-effector position in task space by using joint angles from joint space, applying known link lengths and angles to determine Cartesian coordinates. Inverse kinematics solves the opposite problem by determining the necessary joint angles in joint space to achieve a desired end-effector position and orientation in task space, often requiring complex numerical methods due to multiple possible solutions. These processes enable precise control of robotic manipulators, ensuring accurate movement from desired goals to actuator commands.
Advantages of Joint Space Control
Joint space control offers precise manipulation by directly regulating individual joint angles, enabling smoother and more stable robot movements. It simplifies kinematic calculations and enhances real-time responsiveness during complex tasks. This approach also facilitates collision avoidance and better integration with low-level motor controllers, improving overall system reliability.
Benefits of Task Space Control in Robotics
Task space control in robotics offers precise manipulation by directly managing the robot's end-effector position and orientation, enhancing accuracy in complex tasks like assembly or surgery. It simplifies the integration of sensor feedback for dynamic adjustments, improving adaptability to unpredictable environments. This approach reduces computational complexity in path planning compared to joint space control, leading to faster response times and smoother operation.
Common Applications: Joint Space vs Task Space
Joint space control is commonly applied in robotic manipulators requiring precise control of individual joint angles for tasks such as pick-and-place operations and assembly lines, optimizing movements within mechanical constraints. Task space control, on the other hand, is preferred for applications demanding end-effector trajectory accuracy like welding, painting, and complex path following in dynamic environments. Both control strategies are integral in robotics, with joint space excelling in mechanical simplicity and task space offering enhanced spatial accuracy for end-effector positioning.
Challenges and Limitations in Both Spaces
Joint space control faces challenges in managing complex kinematic constraints and nonlinearities, often resulting in difficulties achieving precise end-effector positioning. Task space control, while intuitive for specifying desired end-effector trajectories, struggles with computational complexity and singularities during inverse kinematics calculations. Both spaces are limited by sensor noise, actuator inaccuracies, and real-time processing demands, impacting the precision and responsiveness of robotic manipulators.
Choosing the Right Space for Robotic Applications
Choosing the right space for robotic applications depends on the specific control objectives and complexity of the task. Joint space control focuses on managing individual joint angles to achieve precise movements, ideal for tasks requiring high accuracy in mechanical positioning. Task space control operates in Cartesian coordinates, enabling direct manipulation of the robot's end-effector for applications involving complex paths and interaction with the environment.
Joint space vs task space Infographic