Low-level control in robotics manages direct hardware actions such as motor commands and sensor data processing, ensuring precise and real-time responses. High-level control focuses on decision-making, task planning, and environment interaction, enabling complex behaviors and adaptive strategies. Combining both control levels is essential for creating efficient and intelligent robotic systems that operate seamlessly in dynamic environments.
Table of Comparison
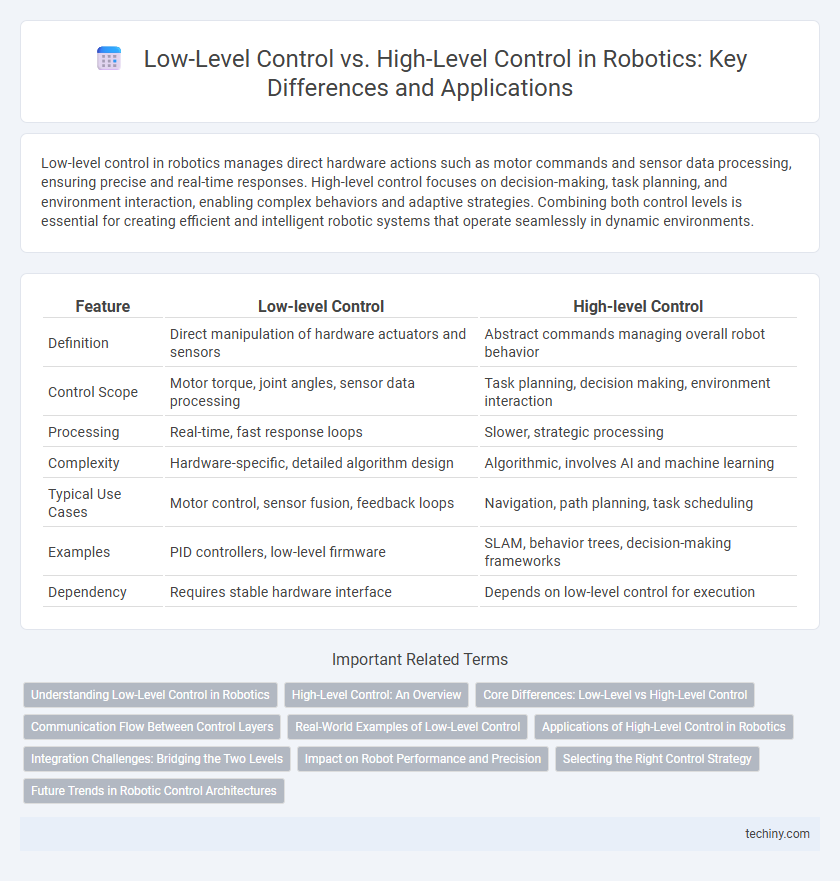
| Feature | Low-level Control | High-level Control |
|---|---|---|
| Definition | Direct manipulation of hardware actuators and sensors | Abstract commands managing overall robot behavior |
| Control Scope | Motor torque, joint angles, sensor data processing | Task planning, decision making, environment interaction |
| Processing | Real-time, fast response loops | Slower, strategic processing |
| Complexity | Hardware-specific, detailed algorithm design | Algorithmic, involves AI and machine learning |
| Typical Use Cases | Motor control, sensor fusion, feedback loops | Navigation, path planning, task scheduling |
| Examples | PID controllers, low-level firmware | SLAM, behavior trees, decision-making frameworks |
| Dependency | Requires stable hardware interface | Depends on low-level control for execution |
Understanding Low-Level Control in Robotics
Low-level control in robotics involves managing the precise movements and actions of individual motors and sensors, ensuring real-time response and stability in a robot's mechanical functions. This control layer translates high-level commands into actionable signals, maintaining feedback loops to adjust torque, velocity, and position for accurate execution. Mastery of low-level control techniques is essential for developing efficient robotic systems capable of performing complex tasks with precision and reliability.
High-Level Control: An Overview
High-level control in robotics involves planning, decision-making, and task execution by interpreting sensory data and commanding low-level controllers. It operates at the cognitive layer, managing complex behaviors, path planning, and multi-robot coordination through algorithms like behavior trees and state machines. This form of control enables robots to adapt to dynamic environments and perform autonomous operations efficiently.
Core Differences: Low-Level vs High-Level Control
Low-level control in robotics manages direct hardware interaction, such as motor commands and sensor feedback, ensuring precise and real-time manipulation of actuators. High-level control focuses on planning, decision-making, and task execution, integrating sensor data to achieve complex behaviors and autonomy. The core difference lies in the abstraction level: low-level control handles immediate physical actions, while high-level control governs strategic goals and overall robot operation.
Communication Flow Between Control Layers
Low-level control in robotics manages direct actuator commands and sensor feedback, ensuring real-time responsiveness through rapid, closed-loop communication with hardware. High-level control processes complex tasks like path planning and decision-making, relying on abstracted data inputs from low-level controllers to optimize robot behavior. Efficient communication flow between these layers leverages standardized protocols and middleware, enabling seamless data exchange and synchronization essential for precise robotic operations.
Real-World Examples of Low-Level Control
Low-level control in robotics involves direct manipulation of actuators and sensors, enabling tasks such as motor speed regulation and joint angle positioning seen in robotic arms used for precise assembly lines in automotive manufacturing. Examples include PID controllers managing servo motors for accurate movement and force feedback systems in prosthetic limbs that adjust grip strength in real time. These controls operate in milliseconds to ensure stability and responsiveness, foundational for high-level algorithms to perform complex autonomous functions.
Applications of High-Level Control in Robotics
High-level control in robotics enables complex decision-making, path planning, and adaptive behavior by processing sensory data and environmental feedback. It is essential for autonomous navigation, human-robot interaction, and multi-robot coordination in dynamic and unstructured environments. Applications include service robots, self-driving vehicles, and industrial automation systems where real-time problem-solving and strategic planning are critical.
Integration Challenges: Bridging the Two Levels
Low-level control in robotics handles precise actuator commands and sensor feedback processing, while high-level control focuses on task planning, decision-making, and environment interaction. Integration challenges arise due to differences in data abstraction, timing constraints, and communication protocols between these control layers. Effective bridging requires robust middleware frameworks and real-time data synchronization to ensure seamless operation and responsiveness.
Impact on Robot Performance and Precision
Low-level control directly manages actuator signals and sensor feedback to ensure precise motion execution, significantly enhancing a robot's accuracy and responsiveness. High-level control focuses on decision-making and task planning, which, while vital for complex behaviors, can introduce latency impacting real-time performance. Optimizing the integration between low-level and high-level control is crucial for achieving both fast, precise movements and intelligent task execution in robotics.
Selecting the Right Control Strategy
Selecting the right control strategy in robotics involves balancing low-level control, which handles precise motor commands and real-time sensor feedback for stability, with high-level control that manages decision-making and task planning. Effective robot performance requires integrating low-level control algorithms like PID controllers with high-level approaches such as behavior-based or model predictive control systems. Optimizing this hierarchy enhances accuracy, responsiveness, and adaptability in complex operational environments.
Future Trends in Robotic Control Architectures
Future trends in robotic control architectures emphasize the integration of low-level control systems, responsible for real-time actuator management and sensor feedback, with high-level control frameworks that enable complex decision-making and autonomous behavior. Advances in AI and machine learning are driving more adaptive and predictive high-level controls, while edge computing enhances the responsiveness of low-level controls. This convergence supports more efficient, scalable, and intelligent robotic platforms across industries such as manufacturing, healthcare, and autonomous vehicles.
Low-level control vs High-level control Infographic