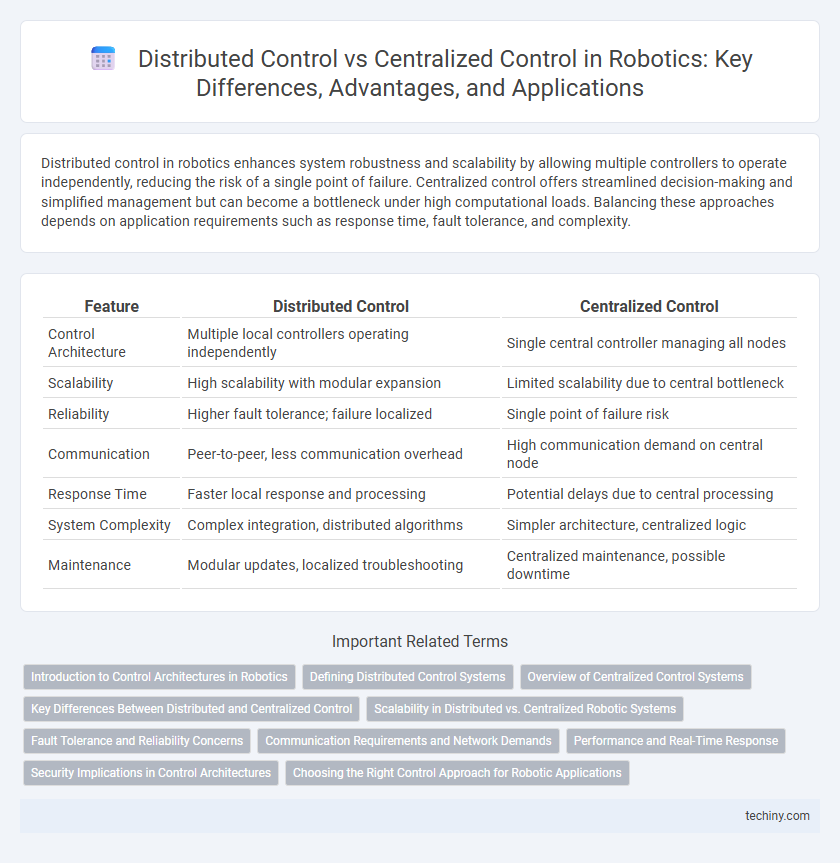
Distributed control in robotics enhances system robustness and scalability by allowing multiple controllers to operate independently, reducing the risk of a single point of failure. Centralized control offers streamlined decision-making and simplified management but can become a bottleneck under high computational loads. Balancing these approaches depends on application requirements such as response time, fault tolerance, and complexity.
Table of Comparison
| Feature | Distributed Control | Centralized Control |
|---|---|---|
| Control Architecture | Multiple local controllers operating independently | Single central controller managing all nodes |
| Scalability | High scalability with modular expansion | Limited scalability due to central bottleneck |
| Reliability | Higher fault tolerance; failure localized | Single point of failure risk |
| Communication | Peer-to-peer, less communication overhead | High communication demand on central node |
| Response Time | Faster local response and processing | Potential delays due to central processing |
| System Complexity | Complex integration, distributed algorithms | Simpler architecture, centralized logic |
| Maintenance | Modular updates, localized troubleshooting | Centralized maintenance, possible downtime |
Introduction to Control Architectures in Robotics
Distributed control in robotics decentralizes decision-making across multiple agents or nodes, enhancing system robustness and scalability, while centralized control relies on a single controller to manage all robot functions, offering simpler coordination but risking single points of failure. Distributed architectures facilitate parallel processing and improve fault tolerance by allowing individual components to operate independently or collaboratively, which is crucial for complex, multi-robot systems. Centralized control typically suits simpler robotic applications requiring tight coordination and streamlined command hierarchies, but faces challenges in latency and bottlenecks as system complexity grows.
Defining Distributed Control Systems
Distributed control systems (DCS) in robotics consist of multiple interconnected controllers that operate independently while coordinating to achieve common objectives. These systems enhance fault tolerance, scalability, and flexibility by distributing decision-making processes closer to the sensors and actuators, reducing latency and communication bottlenecks common in centralized control architectures. By enabling localized processing and real-time data sharing, distributed control systems improve system robustness and adaptability in complex robotic applications.
Overview of Centralized Control Systems
Centralized control systems in robotics rely on a single controller that processes data and makes decisions for the entire robotic network, enabling streamlined coordination and simplified management. This architecture facilitates real-time monitoring and uniform command execution, which enhances system reliability but can create bottlenecks and single points of failure. Centralized control is ideal for applications requiring high-level synchronization and consistent performance across multiple robotic units.
Key Differences Between Distributed and Centralized Control
Distributed control systems in robotics allocate decision-making across multiple nodes, enhancing fault tolerance and scalability, while centralized control systems rely on a single controller that manages all operations, which simplifies coordination but creates a single point of failure. Response time is typically faster in distributed control due to localized processing, whereas centralized control can experience latency issues as all data is routed to one central unit. Furthermore, distributed control supports greater adaptability in complex, dynamic environments, while centralized control offers easier implementation and maintenance for simpler robotic applications.
Scalability in Distributed vs. Centralized Robotic Systems
Distributed control systems in robotics offer superior scalability by enabling multiple agents to operate and make decisions independently, reducing bottlenecks associated with centralized processing. Centralized control systems face limitations in scaling due to the increased computational load and communication overhead directed through a single control unit. Effective scalability in distributed robotics enhances robustness, flexibility, and efficient resource utilization in complex or large-scale applications.
Fault Tolerance and Reliability Concerns
Distributed control systems in robotics enhance fault tolerance by decentralizing decision-making, allowing individual nodes to continue operation despite localized failures. Centralized control systems, while simpler to manage, present a single point of failure that can compromise overall reliability and system performance. Implementing distributed architectures improves system robustness, ensuring higher uptime and resilience in complex robotic applications.
Communication Requirements and Network Demands
Distributed control systems in robotics require robust, low-latency communication networks to enable seamless data exchange between multiple autonomous agents, minimizing single points of failure and enhancing system scalability. Centralized control relies on a high-bandwidth, reliable network to transmit sensor data and control commands from all robotic units to a central processor, increasing the risk of bottlenecks and communication delays. Efficient network design for distributed control emphasizes decentralized data routing and fault tolerance, whereas centralized control demands strong synchronization and high throughput to maintain system responsiveness.
Performance and Real-Time Response
Distributed control in robotics enhances performance by enabling parallel processing across multiple nodes, reducing latency and increasing fault tolerance. Real-time response improves significantly as local controllers handle sensor data and actuator commands independently, minimizing communication delays. Centralized control often suffers from bottlenecks and single points of failure, limiting responsiveness and scalability in dynamic robotic systems.
Security Implications in Control Architectures
Distributed control architectures in robotics enhance security by minimizing single points of failure and localizing breaches, thereby reducing the risk of widespread system compromise. In contrast, centralized control structures concentrate data flow and decision-making, which can become attractive targets for cyberattacks and create vulnerabilities that jeopardize the entire robotic system. Implementing robust encryption and authentication protocols is critical in both architectures to safeguard against unauthorized access and ensure the integrity of control commands.
Choosing the Right Control Approach for Robotic Applications
Distributed control systems in robotics offer enhanced scalability, fault tolerance, and real-time responsiveness by decentralizing decision-making processes across multiple nodes. Centralized control provides simplified system management and streamlined coordination, making it suitable for applications with well-defined tasks and limited complexity. Selecting the right control approach depends on factors such as system size, communication reliability, latency requirements, and the need for adaptability in dynamic environments.
distributed control vs centralized control Infographic